永磁同步調速系統(tǒng)自整定PI速度控制器設計

摘要:針對不同的速度給定,采用了一種增益自整定PI速度控制器。傳統(tǒng)的PI控制器在參數(shù)不準確的情況下控制效果不理想,尤其是在速度給定頻繁變化的情況下,控制效果不能很好地滿足要求。此處采用的控制器克服了傳統(tǒng)控制器的這個缺點。通過對期望速度與實際速度之間差值的運算,使比例增益和積分增益成為差值的函數(shù),可以在一定范圍內變化,從而實現(xiàn)增益的自整定。通過仿真和實驗可知,該方法的控制效果較好,能夠滿足一般要求,從而驗證了該方法理論的正確性和實際的可行性。
關鍵詞:控制器;增益整定;速度控制;永磁同步電機
1 引言
永磁同步電機(PMSM)具有很多傳統(tǒng)電機不具備的優(yōu)勢。它無電刷和滑環(huán),轉動慣量小,轉矩脈動小,因而具有體積小,質量輕,功率損耗小等特點,并且隨著電力電子技術和稀土永磁材料的快速發(fā)展,PMSM得到了廣泛推廣和應用。
對于PMSM的控制,目前應用最多的是雙閉環(huán)控制且多采用PI調節(jié)器。經(jīng)典的PI調節(jié)器工程設計法簡單實用,但是會忽略很多因素,需要很多近似條件,并且在調節(jié)器參數(shù)不準確的情況下,所實現(xiàn)的控制效果往往不能達到預期要求,尤其是在給定值頻繁變化的情況下。而模糊控制、神經(jīng)網(wǎng)絡控制等雖然能夠通過增益自整定實現(xiàn)較好的控制效果,但又相對復雜、繁瑣。
出于這種原因,這里采用了一種相對簡單的增益自整定PI調節(jié)器的設計方法。利用此方法,基本可以實現(xiàn)類似于手工調節(jié)的過程,無需人為地對參數(shù)進行計算或整定。
為了驗證理論分析的正確性及所采用的增益整定PI控制器的性能,這里利用Matlab進行了仿真,并且進行了相關實驗。由仿真和實驗結果可知,所提出的增益整定PI控制器的控制效果基本滿足一般的控制要求。
2 原理與設計
2.1 永磁同步電機模型
2.1.1 永磁同步電機的數(shù)學模型
根據(jù)PMSM控制理論,正弦波PMSM一般沒有阻尼繞組,轉子磁通由永久磁鋼決定,是恒定不變的,可采用轉子磁鏈定向控制,即將兩相旋轉坐標系的d軸定在轉子磁鏈ψr方向上,無需再采用任何計算磁鏈的模型。因此PMSM在d,q軸上的磁鏈方程簡化為:
ψd=Lsdid+ψr,ψq=Lsqiq (1)
式中:id,iq為d,q軸電流;Lsd,Lsq為定子在d,q軸的電感。
d,q軸電壓方程簡化為:
圖2示出增益整定PI速度控制器控制圖。
可知,在0.06 s處.當突加一個750 r·rain-1的速度時,給定與實際轉速的差值相當大,因而kp(t)由最小值突增到最大值,然后繼續(xù)保持在最大,而ki(t)則從最大驟然降為零,并保持在零處。在0.092 s左右,由于實際速度基本到達期望速度,因而,kp(t)由原來的最大值降為最小值,而ki(t)則由零突增到接近最大值,然后由于超調的產(chǎn)生,使得差值相對增大,因而積分作用再次減弱。比例放大作用再次增強。直至到達穩(wěn)態(tài)時,kp(t)和ki(t)都趨向于一個適宜的穩(wěn)態(tài)值,使系統(tǒng)繼續(xù)保持穩(wěn)定。在后面兩個給定值發(fā)生變化的過程中,kp(t)與ki(t)的變化與第一個過程基本相同,在此不再贅述。由Matlab仿真的3個過程可知,比例與積分這兩個增益的協(xié)調變化與預先設想的相同,并且能夠使系統(tǒng)達到較滿意的控制效果,從而驗證了理論分析的正確性。
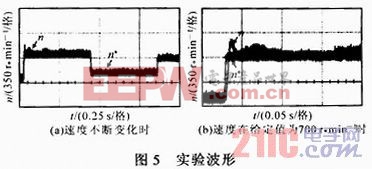
3.2 實驗結果
結合上述理論分析和系統(tǒng)仿真,對理論進行了實驗驗證。圖5a為速度不斷變化時的速度響應曲線。可知,當期望值與起始值的差值較大時,kp(t)的作用很強,會產(chǎn)生足夠小的超調量;而當差值較小時,則沒有超調,并在約0.1 s內無靜差地到達期望值。這與系統(tǒng)仿真的結果基本相符。圖5b為速度在給定值為700 r·rain-1時的速度響應曲線。可知,從起始的100 r·min-1到達給定的700 r·rain-1,用時約為0.1 s,且只有很小的超調量。
由實驗結果可知,按上述方法設計的控制器能夠在無需人為調節(jié)的情況下較好地滿足系統(tǒng)的控制要求,并且與仿真結果基本相符,再次證明了理論分析的正確性。
4 結論
需要指出,此處只是以速度控制器為例介紹了上述設計方法,此方法還可用于電流控制器的設計。由上述的理論分析、系統(tǒng)仿真和實驗驗證可知,使用增益整定PI速度控制器在參數(shù)不準確和給定值頻繁變化的情況下,可以簡單、快捷地達到較好的控制效果,可以很好地模擬手動調節(jié)的過程,而無需人為地憑借經(jīng)驗調節(jié)或者是經(jīng)過繁瑣的計算得出,因而這種增益整定控制器的設計方法有很好的實際應用價值。










評論