基于CAN總線的車燈控制系統設計方案

2 硬件設計
本設計以8051 單片機和Intel 82527 CAN 總線控制器為核心構成智能節點。其中, Intel 82527 CAN控制器支持CAN2. 0 標準, 包括標準的和擴展的數據和遠程幀, 可程控全局屏蔽; 包括標準和擴展信息標識符, 具有15 個報文緩沖區, 每個數據長度為8 字節;14 個T X/ RX 緩沖區, 1 個帶可程控屏蔽的RX 緩沖區; 可變CPU 接口, 具有多路8 位總線( Intel 或Motorola 方式) 、多路16 位總線、8 位非多路總線( 同步/ 異步) 以及串行接口; 位速率可程控, 并有可程控的時鐘輸出; 可變中斷結構; 可對輸出驅動器和輸入比較器結構進行設置; 2 個8 位雙向I/ O 口; 44 腳PLCC 封裝。
本方案選用Philips 公司的PCA 82C250 為CAN總線收發器和物理層總線接口, 它可以提供對總線的差分發送和接收、高速斜率控制和待機3 種不同工作方式, 能夠隔離瞬態干擾, 提高接收和發送能力。在硬件設計中, 82527 完成與CAN 總線的信息交換,8051 完成對車燈繼電器的驅動; 旁路輸入比較器, 與8051 的信息交換采用中斷方式, 地址為7F00 ~7FFFH.系統硬件結構見圖3.
3 軟件設計
CAN2. 0B 協議只制定了CAN 物理層與數據鏈路層的協議, 在進行系統設計時, 必須根據用戶的需要制定相應的CAN 應用層協議。根據總線系統各節點及其所要實現的功能, 確定相互間共享的數據, 然后了解各節點需接收和發送的信息, 統一制定CAN 網絡中需傳輸的信息, 最后給制定好的CAN 網絡傳輸消息分配標識符。CA N 協議規定, 標識符ID 越小, 優先權越高,因此, 在確定ID 時, 先要分析該信息幀需求的緊急性。
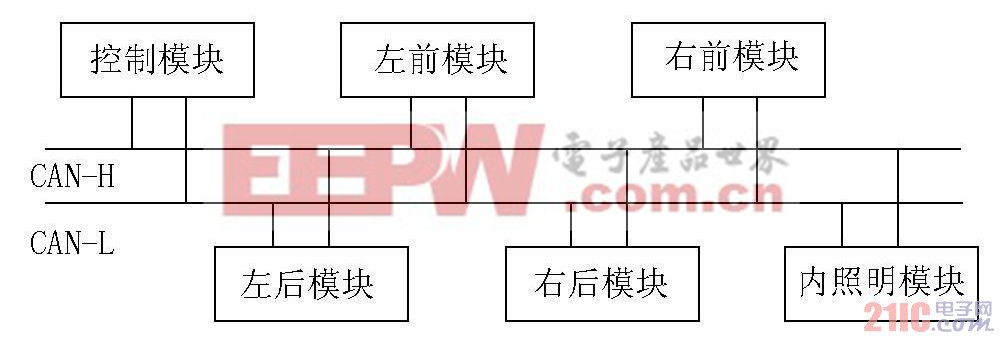
將汽車車燈位置分布和行駛安全性要求作為各模塊劃分的依據, 以控制模塊、左后模塊、右后模塊、左前模塊、右前模塊、內照明模塊為順序分配ID.
信息編碼是把相近或相關的信息組合成一個數據塊, 使它們的數據可按同樣的頻率從控制節點發送到總線上。其它CAN 節點可同時獲得這組信息, 并對該信息進行相應的處理。本車燈控制系統通過主控制器發送信息, 各分節點先通過驗收/ 屏蔽濾波器接收自己需要的信息, 屏蔽不需要的信息, 再根據接收內容進行相應操作。其中4 個分節點均設置為單濾波, 主控制器發送的1B 數據中各位的含義見表1.
4 試驗及結論 按前面所介紹的硬件和軟件設計方案, 在試驗室完成車燈控制系統, 組合成車燈臺架, 通過對該系統硬件、軟件的反復調試進行控制試驗。臺架試驗結果證明, 本車燈控制系統的設計方案可行, 減少了線束的使用, 且性能可靠, 具有較好的工程應用前景。由此也可以預見, 隨著CAN 總線在汽車電氣控制方面的廣泛應用, 汽車的使用性和可靠性等方面也將會得到很大的提高。










評論