基于Simulink仿真的用戶星天線控制系統分析

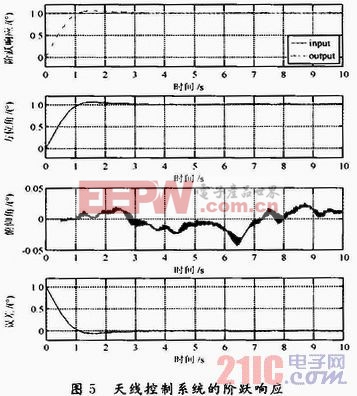
圖5為天線控制系統的階躍響應,可以看出,在接收機輸出信號干擾較大的情況下,天線控制系統能較好地跟隨目標。方位軸角度變化與θ一致,俯仰軸角度在零值附近,天線轉動角度能跟隨給定θ,說明所建立的仿真模型能實現天線控制系統的功能。在初始角度偏差較大時,模式選擇模塊選擇程控模式,控制器作用電機以限定的最高轉速運行,使偏差快速減小。當角度誤差小于0.4°時,牽引轉入自動跟蹤模式,控制器根據接收機輸出的方位、俯仰誤差電壓控制電機轉速增大或減小,使偏差進一步減小,最終達到穩定狀態,穩態時的跟蹤誤差低于0.05°。本文引用地址:http://www.104case.com/article/159961.htm
天線控制系統要求跟蹤精度低于0.05°,因此給定輸入為斜坡信號,角速度為0.25(°)/s,系統的輸出響應及誤差曲線如圖6所示。
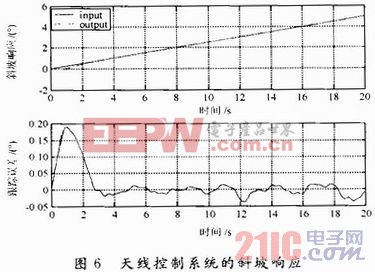
從圖6可以看出,系統穩定時的跟蹤誤差低于0.05°,滿足天線控制系統的指向精度要求。
3 結語
在對天線控制系統各組成部分進行分析的基礎上,在Simulink環境下完成了天線控制系統的仿真模型,所搭建的仿真模型能實現天線控制系統的各個功能,并能準確地跟隨目標,跟蹤誤差低于0.05°,滿足天線控制系統的指向精度要求,證明了所設計的天線指向控制系統的有效性,為進一步研究天線控制系統的抗干擾性能提供了基礎。







評論