微弱GPS信號差分快速捕獲算法

2.2 累積算法性能對比
由于3種累積方式的不同特性,在低信噪比環境下,單獨的使用一種累積方式,很難獲得理想的捕獲性能。為了平衡算法效率與信號捕獲效果,通常是將相干累積與另外兩種累積算法結合使用,或在基本的累積算法基礎上進行改進,以克服其存在不足,使弱信號累積算法具有更好的性能。
在改善檢測統計量信噪比方面,相干累積的效果是最好的,差分相干累積捕獲算法其次,非相干累積最差。因為相干累積時信號功率呈平方倍增長,噪聲功率僅是線性增長,使得信噪比線性提高;差分相關捕獲算法對相鄰相干累積值的共軛相乘再累積會使信號部分增強,但信號和噪聲的交叉乘積項成為新的噪聲,它對信噪比的改善不及相干累積;而非相干累積把信號和噪聲作平方處理再累積,由于平方損失
(squaring loss)噪聲部分被放大,對信噪比的改善效果最差。若在低信噪比環境下應用非相干累積算法,要么檢測性能很差,要么必須通過大幅增加累積次數來抬高信噪比,這樣會延長捕獲時間。
在捕獲時間方面,相干累積由于sinc(π△fT)中△f的限制,頻域搜索的步長較小,頻域搜索次數增多,整個搜索時間較長。而差分相關捕獲算法和非相干累積算法都在相干累積后進行了第二次累積以提高信噪比,因此,相干累積時間T可設得較短,△f的限制也可相應放寬,頻域搜索步長可加長,捕獲時間比相干累積算法短。
在實際的算法設計中.都是以1 ms相關結果矩陣為基本單元。然后根據提高處理增益的累積方式,進行累積處理。非相干累積的基礎是相干累積,同樣差分相干累積的基礎也是相干累積。
3 新算法的設計
通過對導航電文數據的分析,可發現導航數據編碼規則中,通過特殊的運算規則使得在幀同步字之前的交接字的最后兩個比特始終為00,來保證接收機收到的幀同步信息始終為10001011,因而在接收數據的幀同步位置可預知的接收比特為0010001011共10的比特。綜合考慮算法效率和捕獲靈敏度等綜合因素,利用導航數據中已知的與幀同步相關的信息和快速相干累積的思想,充分利用差分相關時可快速進行一維搜索的特性,設計算法整體方案如圖1所示。本文引用地址:http://www.104case.com/article/159694.htm
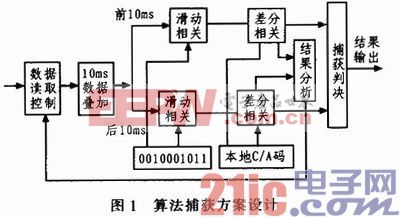
算法的具體實現步驟如下:
1)每次控制讀取160 ms的GPS數字中頻數據,并進行以10 ms為單位的數據直接疊加;
2)分別將兩組疊加數據與本地10比特幀同步信息進行滑動相關,當接收數據當中含有幀同步信息時,相關操作會獲得與之相對應的信號處理增益;
3)將上步獲得的數據與本地C/A碼進行差分相關運算,得到捕獲運算結果;
4)分析捕獲結果,控制數據讀取的位置,從而找到幀同步碼提高信號處理增益;
5)輸出捕獲判決結果。
3.1 數據直接疊加
根據文獻中對傳統相干累積算法的改進思路,這里對傳統的查分累積進行了類似的改進,即先直接進行數據直接疊加操作,在進行相關運算。通過使用仿真GPS中頻數據對改進后的捕獲相關運算效果對比發現,對于相干累積算法,改進后的運算時間僅為傳統算法的1/20,而捕獲峰值略有下降;對于差分累積算法,改進后的運算時間為傳統算法的1/10,而捕獲峰值無明顯變化。
3.2 捕獲判決
由算法的捕獲步驟可知,算法讀取數據后實際是對一組10比特數據進行交替半比特相干累積,而導航數據比特翻轉要么在奇數組數據中,要么在偶數組數據中。對于存在數據比特翻轉的數據組,其最終捕獲運算的結果幅值能量應當小于另外一組。對于捕獲結果的判決采用成熟的tang搜索算法,其流程如圖2所示。

當捕獲程序對信號進行粗捕獲,人為某一搜索單元可能存在衛星信號時,則使用tang搜索捕獲算法,在同一搜索單元多次搜索對信號進行捕獲判決。算初始時設定一初值K,對設定的一組數據進行多次捕獲判決記錄分析,當捕獲幅值V超過捕獲門限Vt時K值加1,否則K值減1,當K=A(A為一設定值)時,則人為該信號存在,并成功捕獲;當K=0時,則人為該信號不存在,捕獲失敗。
3.3 差分碼的快速構建
在使用差分相關算法進行捕獲運算時,由于要構建新的差分碼是捕獲中新增的運算量,因而這里采用文獻中的思想,基于塊處理方法,利用常規數字匹配濾波器捕獲結構進行新差分碼的生成。在n和,n-1時刻CDMF輸出表達式為:
![]()
其中,xi為接收到的數字信號,ai為本地偽碼序列。由于本算法采用的是GPS基帶數據保持不動、本地偽碼序列作循環移位結構,故式(5)應改寫為
![]()
由于C/A碼的周期性可得a0=aN,兩式相減,得到一個新序列為

顯而易見,差分碼di的取值范圍只有+2、-2和0 3種,當差分碼為0時,是不需要乘法運算的。在這里將差分碼di中非零各項的位置和數值分別用pj和ej表示,其中j=1~k,K為差分碼di(i=1~N)中非零項的個數。由文獻的推導,差分碼中數值為0的個數為2r-1-1(r為PN碼生成多項式的階數),所以本算法中所需乘法運算的次數K=2r-1,約為CDMF所需數量的1/2。特別是當每個碼片采樣為M點時,相乘累加運算量降低為常規方法的I/2M,大大降低了系統所需乘法器的數量。經過對GPS衛星32個C/A碼序列的分別計算,K取值范圍為480~544,與GPS中頻信號采樣頻率和C/A碼初始相位無關。


評論