基于無線模塊NRF905的節(jié)能路燈控制系統(tǒng)設(shè)計(jì)

4.3 物體位移感應(yīng)(光電開關(guān))的編程
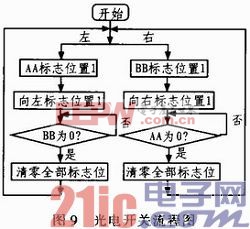
本系統(tǒng)要求支路控制器應(yīng)能根據(jù)交通情況自動(dòng)調(diào)節(jié)亮燈狀態(tài):當(dāng)可移動(dòng)物體M(在物體前端標(biāo)出定位點(diǎn),由定位點(diǎn)確定物體位置)由左至右到達(dá)S點(diǎn)時(shí)(見圖2),燈1亮;當(dāng)物體M到達(dá)B點(diǎn)時(shí),燈1滅,燈2亮;若物體M由右至左移動(dòng)時(shí),則亮燈次序與上相反。根據(jù)此要求設(shè)計(jì)出流程圖如圖9所示。本文引用地址:http://www.104case.com/article/159691.htm
4.4 無線發(fā)送模塊NRF905
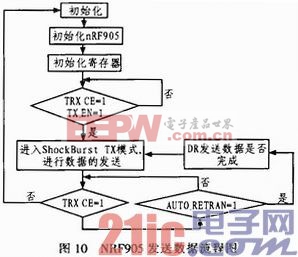
發(fā)送模式編程要點(diǎn):1)當(dāng)微控制器(單片機(jī))有數(shù)據(jù)要發(fā)送時(shí),通過SPI口按時(shí)序把接收機(jī)的地址和要發(fā)送的數(shù)據(jù)傳給NRF905。2)微控制器置高TRX_CE和TX_CE觸發(fā)NRF905的ShockBurst TX發(fā)送模式并發(fā)送數(shù)據(jù)。3)如果AUTO_RETRAN被置高,NRF905將不斷重發(fā),直到TRX_CE被置低,否則只發(fā)送一次。4)當(dāng)TRX_CE被置低,NRF7905發(fā)送過程完成,自動(dòng)進(jìn)入空閑模式。據(jù)此得到發(fā)送模式程序流程圖如圖10所示。
4.5 無線接收模塊NRF905
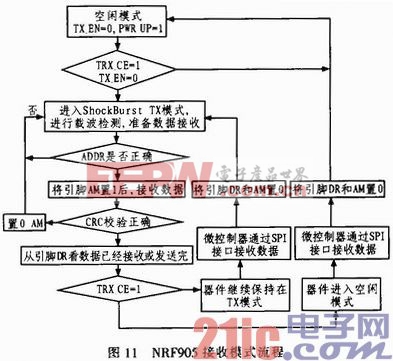
接收模式編程要點(diǎn):1)當(dāng)TRX_CE為高、TX_EN為低時(shí),NRF905進(jìn)入ShockBurst RX接收模式650μs后,NRF905不斷監(jiān)測(cè),等待接收數(shù)據(jù)。 2)當(dāng)一個(gè)正確的數(shù)據(jù)包接收完畢,NRF905自動(dòng)移去字頭、地址和CRC校驗(yàn)位,然后把數(shù)據(jù)準(zhǔn)備引腳DR置高,TRX_CE置低,NRF905進(jìn)入空閑模式。3)微控制器通過SPI口以一定的速率把數(shù)據(jù)移到微控制器內(nèi)。4)當(dāng)所有的數(shù)據(jù)接收完畢,NRF905把數(shù)據(jù)準(zhǔn)備引腳DR和地址匹配引腳AM置低。此時(shí),NRF905可以進(jìn)入ShockBurstRX接收模式,ShockBurst TX發(fā)送模式或關(guān)機(jī)模式。NRF905接收模式程序流程圖如圖11所示。
4.6 支路控制總設(shè)計(jì)
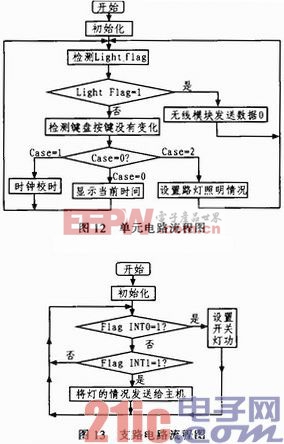
根據(jù)以上各個(gè)模塊程序的編寫,最終設(shè)計(jì)出支路控制總流程圖12與單元電路控制總流程圖13,分別如下所示。
5 結(jié)論
本系統(tǒng)設(shè)計(jì)通過無線裝置NRF905來實(shí)現(xiàn)設(shè)計(jì)要求,如果應(yīng)用在實(shí)際路燈中,設(shè)備維護(hù)方便,成本較低,并且容易控制,不易受到干擾,信號(hào)穩(wěn)定。所以使用無線模塊的電路設(shè)計(jì)簡(jiǎn)單,應(yīng)該是將來路燈控制發(fā)展的方向。無線控制模塊的應(yīng)用在實(shí)際路燈的控制中已經(jīng)成為一種主流,并且也是將來發(fā)展的趨勢(shì),值得進(jìn)一步研究。












評(píng)論