基于XC164CM的LED汽車燈控制系統設計

摘要:本文的主要內容是設計并實現一個LED汽車燈控制系統。文中闡述了控制系統的實現原理,并詳細介紹了軟、硬件的設計方案和實現過程。該系統以XC164CM單片機為控制核心,主要實現了車燈亮度的自適應調節,狀態監控,人機交互等控制功能。實驗結果表明本系統性能穩定,可被廣泛應用。
關鍵詞:XC164CM單片機;LED;自適應;車燈控制系統;CAN總線
在現代行車安全系統中,車燈控制系統有著重要的作用。據資料記載,交通事故大部分發生在夜間或惡劣天氣下,而在這些交通事故當中,大部分是由于車燈控制系統不能及時滿足安全需求所造成的,例如傳統車燈亮度單一,視距較短,不能隨外界環境的變化自動調節亮度和模式,有時會造成能源浪費,有時又不能滿足照明需求等。因此,設計更實用、更智能的車燈控制系統已經成為當務之急。
本文研制的車燈控制系統,采用發光亮度高、反應速度快、耐惡劣環境、工作性能可靠的LED燈,提高燈光亮度和視角范圍,減小安全車距,有效地改善了行車安全性能。本系統應用了傳感器技術、微處理器技術、電子電路技術和CAN總線技術,對環境亮度和行車狀況實現精確感測和判斷,并根據行車需要自動選擇合適的照明模式,從而實現了車燈的自適應控制。該控制器能有效地輔助駕駛員行車,減輕駕駛員的操作負擔,最大限度的避免了人為因素導致的違章使用燈光,從而達到了減少交通事故的目的。
1 車燈控制系統
1.1 系統工作原理
該系統通過外置的傳感器感測環境亮度強弱和控制板溫度,將其轉化為光敏和熱敏電阻的分壓信號及LED驅動分壓信號,并由單片機AD模塊進行采集。
單片機根據事先劃分好的等級對AD轉換后的數字信息進行分析歸類,判斷出汽車當前所處的行車環境(白天、雨霧天氣、戶外傍晚或深夜、會車、隧道等),再與內置的特征參數進行對比和開關掃描后自動選擇燈光亮度和行車模式。根據選定的參數,由XC164CM輸出相應的PWM信號來調節車燈的亮度。
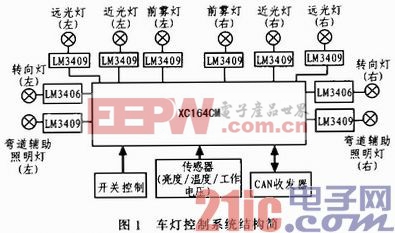
車燈當前所處的狀態可以通過CAN總線接口發送到上位機,上位機也可以發送調整信息改變車燈的狀態,從而實現了人機交互功能。系統結構如圖1所示。
1.2 系統功能設計
文中設計的LED車燈控制系統主要完成了以下幾個功能。
1.2.1 亮度自適應調節
將外界的環境亮度分為3個等級:明亮(晴天戶外等),昏暗(戶外陰雨,戶外傍晚,隧道,停車場等室內場所),漆黑(戶外深夜或其他類似場合)。系統可以根據當前環境的亮度等級自動調整車燈的亮度,以滿足不同情況下的照明需求。車燈亮度分為4級、6級、8級亮度,其中4級最暗,8級最亮,6級居中。車燈亮度的調節策略如下:
1)當環境亮度增強時,信號燈的亮度增強;環境亮度減弱時,照明燈的亮度增強。
2)由于將車燈亮度瞬間降低具有一定的危險性,所以在降低車燈亮度時,需做兩次判斷:在環境亮度增強時,照明燈的亮度并不立即減弱,而是繼續等待一個周期,若環境亮度保持在較低的值沒有變化,再將照明燈調暗;在環境亮度減弱時,對信號燈采取同樣的操作。
1.2.2 狀態監控及過溫保護
實時監控驅動器輸出到LED燈的電壓并將結果通過上位機顯示。LED燈定義為3種狀態:故障態、關閉態、工作態,這3種工作狀態由LED燈當前工作電壓和開關狀態區分。過溫保護是通過實時監控驅動器工作溫度實現,當驅動器環境溫度值超過80度時,產生過溫提示信號,以提示選取溫控模式(驅動輸出降額允許)。
1.2.3 人機交互
控制系統通過XC164CM單片機自帶的CAN總線接口與上位機CAN接收器連接,實現與上位機信息的交互。上位機不僅可以查詢和獲取車燈的工作狀態數字量(故障態、關閉態或亮度級),還可以發送控制命令調整車燈的亮度以及是否進入智能照明模式,從而實現人機交互。
2 硬件設計
硬件主要由單片機控制模塊,傳感器模塊,CAN總線模塊和LED驅動模塊四部分組成。
2.1 XC164CM單片機簡介
XC164CM單片機是Infineon公司推出的采用低功耗CMOS工藝生產的增強型16位單片機,其主要特點有:1)采用C166SV2內核;2)內部集成大容量的存儲器;3)帶自校檢的14路A/D轉換器;4)兩個比較,捕獲單元,可方便地產生PWM波;5)Twin CAN模塊,可通過網關交換數據。
2.2 傳感器裝置
環境亮度的采集由3組位于不同位置(前部、側身、頂部)的亮度傳感器完成。其中亮度傳感器為安裝在感光位置的光敏電阻GM5528(亮電阻10~20 kΩ,暗電阻1 MΩ,響應時間20~30 ms),GM5528通過分壓電路輸出的電壓值隨著環境亮度變化而改變;溫度監控電路使用熱敏電阻MF58構成分壓電路,將溫度值的變化轉換為電壓值的變化;狀態監控電路通過電阻分壓網絡分別采樣10路LED驅動器的輸出電壓,并以此判斷LED燈的工作狀態。
2.3 CAN控制模塊
XC164CM單片機集成了TwinCAN模塊,實現CAN總線通信功能。其主要特性為:1)包括兩個全CAN功能節點,每一個CAN節點通過一對接收和發送引腳連接到總線收發器,可獨立工作或者通過網關功能交換數據幀和遠程幀。2)CAN幀的發送和接收遵循CAN V2.0B(active)規范,且每個CAN節點都能接收和發送帶11個標識符的標準幀和帶29位標識符的擴展幀。3)具有靈活和功能強大的報文傳送控制和錯誤處理能力,CAN總線通信處理更加精確和方便。4)2個CAN節點的位定時源于外設時鐘,可以通過編程使數據速率達到1 Mbps。5)具有8個單獨的可編程中斷節點和適用于發送和接收的FIFO。







評論