基于光電管路徑識別的智能車系統設計

引言
本文引用地址:http://www.104case.com/article/159665.htm隨著控制技術及計算機技術的發展,智能車系統將在未來工業生產和日常生活中扮演重要的角色。本文所述智能車尋跡系統采用紅外反射式光電管識別路徑上的黑線,并以最短的時間完成尋跡。通過加長轉臂的舵機驅動前輪轉向,使用符合PI算法的控制器實現直流電機的調速。為了使智能車快速、平穩地行駛,系統必須把路徑識別、相應的轉向伺服電機控制以及直流驅動電機控制準確地結合在一起。
1 硬件設計
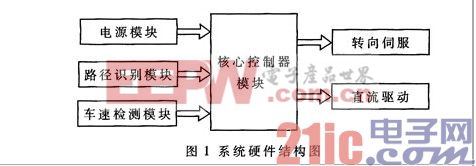
本系統硬件部分以飛思卡爾公司的16位微處理器MC9S12DG128為控制核心,由電源模塊、主控制器模塊、路徑識別模塊、車速檢測模塊、舵機控制模塊和直流驅動電機控制模塊組成。系統硬件結構如圖1所示。
1.1 主控制器模塊
本系統主控制器模塊采用的MC9S12DG128主要特點是功能高度集中,易于擴展且支持C語言程序設計,從而降低了系統開發和調試的復雜度。
1.2 電源模塊
本系統由7.2V/2000mAh的Ni-cd蓄電池組直接供電。鑒于單片機系統的核心作用,主控制器模塊采用單獨的穩壓電路進行供電;為提高舵機響應速度,將電源正極串接一個二極管后直接加在舵機上;電機驅動芯片MC33886直接由電源供電。通過外圍電路整定,電源被分配給各個模塊。電源調節分配圖如圖2所示。

1.3 路徑識別模塊
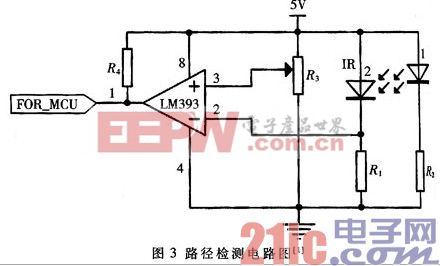
路徑識別模塊采用收發一體的紅外反射式光電管JY043作為路徑的基本檢測元件。本系統選用11個JY043按“一”字形排列在20cm長的電路板上,相鄰兩個光電管之間間隔2cm。因為路徑軌跡由黑線指示,落在黑線區域內的光電二極管接收到的反射光線強度與白色的不同,所以根據檢測到黑線的光電管的位置可以判斷行車方向。光電傳感器尋跡的優點是電路簡單、信號處理速度快。在不受外部因素影響的前提下,光電管能夠感知的前方距離越遠,行駛效率越高,即智能車的預瞄性能越強。圖3為其硬件原理圖。







評論