一種新型雙饋風電機組低電壓穿越技術研究

4 仿真與實驗
4.1 仿真分析
額定風況時,電網電壓發生20%不平衡跌落,2 MW風電機組在所述兩種控制策略下對其暫態特性進行仿真。風電機組在發生LVRT跌落和恢復過程時,其發電機和齒輪箱暫態軸扭矩載荷仿真結果如圖6所示,其中upha為風機相電壓,it為風機總電流,Tgen為風機扭矩,Tgea為齒輪箱扭矩。本文引用地址:http://www.104case.com/article/159585.htm
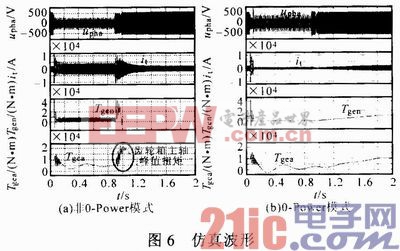
綜上所述:①風電機組在非0-Power控制模式下,發電機和齒輪箱軸承受額外的附加不良扭矩,影響機組長時間運行的特性和使用壽命;LVRT發生或恢復過程中產生大的暫態電流,可能觸發風電機組變流器的保護定值;在外部電網恢復過程中無功的注入具有挑戰;②風電機組在0-Power控制模式下,發電機和齒輪箱軸不承受額外的附加不良扭矩;在外部電網恢復過程中,電流的各種暫態無沖擊且平穩過渡。
4.2 實驗分析
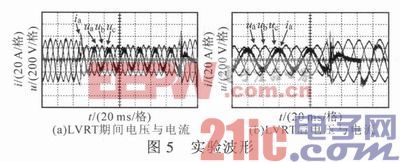
以對某公司2 MW雙饋風力機組在國家實驗中心進行LVRT測試。風電機組在新型LVRT方案下進行LVRT測試并通過國家關于LVRT測試標準。現以電網(機組運行功率為2 MW,風速大于額定風速12 m/s)發生20%不平衡跌落為例,進行非0-Power模式及0-Power模式實際測試,實驗波形如圖7,8所示。
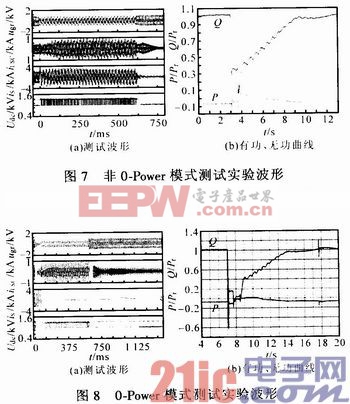
由圖7,8可知:①風電機組在非0-Power控制策略下通過國家關于LVRT的測試:②在非0-Power控制模式下,風電機組的有功在LVRT發生過程和恢復過程存在暫態波動或額外峰值;③風電機組在0-Power控制模式下可實現LVRT,在LVRT發生和恢復過程不存在有功暫態波動或峰值;④由于實驗測試時未對風電機組發電機軸和齒輪箱軸進行扭矩監測,因此沒有實際測試數據驗證不同控制模式下其暫態特性。
5 結論
新型LVRT技術方案經過實際測試,從仿真和測試波形分析驗證了此技術方案硬件和非0-Power控制模式的正確性。由于實驗測試時未對風電機組發電機軸和齒輪箱軸的扭矩進行監測,后續進行其他特性測試的同時,進行了風電機組機械特性測試驗證。同時提出了一種0-Power控制模式,在風電機組電網電壓跌落低于20%情況下實現了風電機組不停機穿越電網故障,而且在此控制策略下可減少風電機組在LVRT發生和恢復過程中暫態對風電機組的不良影響。0-Power控制策略為研究風電機組LVRT技術提供了一種研究思路來改善風電機組在LVRT發生過程中所產生的機械載荷機組本身產生的不良影響,以達到提高風電機組使用壽命的目的,然后再采取不同技術改善機組的LVRT性能。


評論