高壓變頻器無(wú)速度傳感器矢量控制轉(zhuǎn)速辨識(shí)

圖2中,截止頻率ωc取為轉(zhuǎn)子勵(lì)磁時(shí)間常數(shù)Tr的倒數(shù)。
。基于d,q坐標(biāo)系下的轉(zhuǎn)子磁鏈電流模型如圖3所示。本文引用地址:http://www.104case.com/article/159428.htm
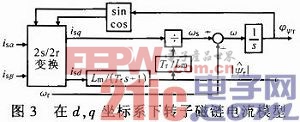
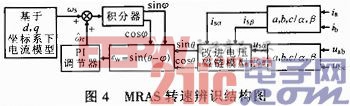
3.3 轉(zhuǎn)速辨識(shí)
圖4為MRAS轉(zhuǎn)速辨識(shí)結(jié)構(gòu)圖。轉(zhuǎn)子磁鏈電壓模型和電流模型比較的是同一狀態(tài)變量,即轉(zhuǎn)子磁鏈角度。認(rèn)為電壓磁鏈模型估計(jì)的轉(zhuǎn)子磁鏈角度真實(shí)而又準(zhǔn)確。如果電流模型計(jì)算的轉(zhuǎn)子磁鏈角度與電壓模型確定的相同,那么轉(zhuǎn)速辨識(shí)準(zhǔn)確。圖4所示的轉(zhuǎn)速估算方法就是對(duì)電壓模型與電流模型的轉(zhuǎn)子磁鏈角度差進(jìn)行PI控制,從而辨識(shí)出電機(jī)轉(zhuǎn)速。轉(zhuǎn)子角速度辨識(shí)公式為:

4 仿真分析
為證實(shí)理論與分析,利用Matlab/Simulink搭建了級(jí)聯(lián)逆變器異步電機(jī)無(wú)速度傳感器矢量控制仿真模型。該系統(tǒng)中異步電機(jī)模型的主要參數(shù):Rs=87 mΩ,Rr=228 mΩ,Lσs=Lσr=0.8 mH,Lm=34.7 mH,np=2,J=1.662 kg·m2。級(jí)聯(lián)的各單元母線電壓Udc=180 V,每相三級(jí)功率模塊串聯(lián)。






評(píng)論