GPS智能塔鐘控制系統的研究

3.5 系統原理框圖
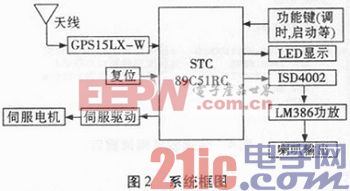
根據設計要求,它包括天線、GPS-OEM接收模塊、單片機信號處理電路、EEPROM存貯器、報時電路、揚聲器,其中天線、GPS-OEM接收模塊、單片機信號處理電路、主控制電路四部分以串聯結構連接,主控制電路分別與EEPROM存貯器、報時電路、顯示電路以分支結構連接,報時電路與揚聲器以串聯結構連接。本系統原理框圖如圖2所示。本文引用地址:http://www.104case.com/article/159359.htm
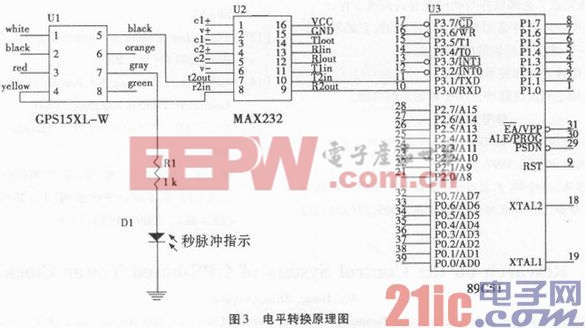
由于GPS15XL-W輸出的是RS232電平,AT89C51單片機是CMOS電平,所以二者之間通信需要電平轉換。如圖3所示。
4 軟件設計
本系統軟件設計主要有兩部分:單片機控制時鐘走時及單片機接收GPS接收機時間信息進行實時校時,前者較為簡單此處不再贅述,僅對校時系統進行介紹。
4.1 GPS同步校時方案選擇
GPS的校時可分為兩種類型:脈沖中斷方式和串行通信接口方式。GPS本身提供的時間信息是非常精確的。但采用哪種方式對自動保護裝置中的實時時鐘芯片進行授時,就成了保證時間精度的關鍵。本設計選擇串行通信方式可以滿足塔鐘基本要求。
串口通信方式是以串行數據流的方式輸出時間信息,各個自動保護裝置接收每秒一次的串行時間信息來進行校時。在此校時過程中,串口發送以及接受數據都是采用中斷方式,雙方的中斷處理程序都將占用CPU的時間,此外延時的大小還與雙方串口中斷優先級的設置有關。另外,在串行通信方式中,數據是按照一定的波特率逐位傳輸的,因此總線傳輸也將有延時,該延時的大小與波特率以及傳輸的數據量均有關。在以上影響校時精度的各個因素中,只有傳輸延時是可以準確計算的,其他的只能作大致的估計,在將以上因素綜合考慮后,可以通過給時間信息一個修正值,來保證校時的精度。
4.2 獲取GPS標準時間信息
GPS20EM板采用NMEA20183通信標準格式,可以輸出多種句型,均以“$”開頭。設計要提取的語句是“$GPRMC”,$GPRMC,1>,2>,3>,4>,5>,6>,7>,8>,9>,10>,11> 3 hh CR>,LF>。
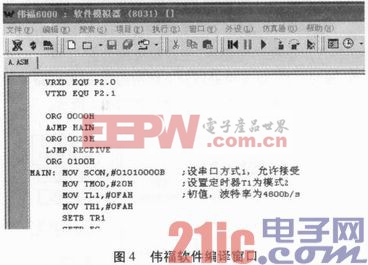
軟件編譯窗口如圖4所示:
5 小結
在系統設計中,完成以下幾個部分:
(1)系統硬件設計,設計以可靠性和實用性為原則,選用器件在保證可用的基礎上,盡量使電路簡化,在設計過程中,用實驗的方法完成了全部軟件與硬件配合的調試工作;
(2)接收模塊的軟件是用匯編語言完成的,它的功能是從GPS15XL-W中提取準確的時間信息;
(3)完成母鐘走時和顯示的功能;
(4)向伺服電機發送脈沖帶動子鐘的走時功能。

伺服電機相關文章:伺服電機工作原理












評論