網絡化控制模型的設計

2.3 神經網絡在本控制系統參數整定和優化過程中的應用
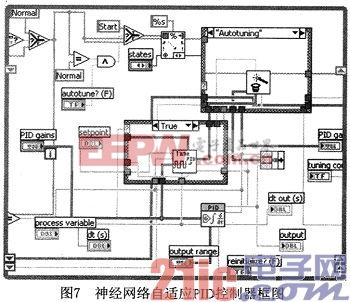
圖7為用LabVIEW編寫的神經網絡模糊自適應PID控制器的框圖,主要由自適應向導、自適應模塊、以及PID控制模塊三部分組成。自適應向導為用戶提供一個用戶友好的界面,用戶可以介入自適應調節過程,并對一些參數進行設定。自適應模塊根據設定自己過程參數,再按照神經網絡自適應算法對PID參數進行自動在線整定,整定完成后的PID參數對現場設備內的參數進行修正。
但實際的對象階躍響應實驗結果表明,上位箱液位對象的實際特性與理想的一階慣性環節差異較大。這一方面是因為由于受到硬件限制,進水閥的線性以及靈敏度不夠高,而另一方面也是因為干擾的緣故,水泵的啟停所造成的沖擊等。另外由于通信網絡所產生的傳輸時間延遲,該對象還要附加一個純延遲環節。
直接采甩Ziegler-Nichol整定方法時,由于對象階躍響應曲線不夠精確,實際的被控對象也不是一階慣性環節,所以整定效果不太理想。實驗測得的閉環階躍響應曲線如圖8所示。
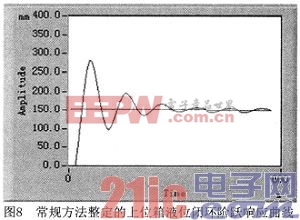
從圖8可以看出,當采用常規的整定方法時,整定效果不太讓人滿意,系統的超調過大,調節時間也太長。
而且當由于別的干擾因素,如氣溫上升等而影響到系統的特性參數時,還需要重新測定對象的開環階躍響應曲線,費時費力,缺乏自動性。
當采用基于神經網絡模糊PID控制算法的在線整定方案后,系統的閉環階躍響應曲線如圖9所示。
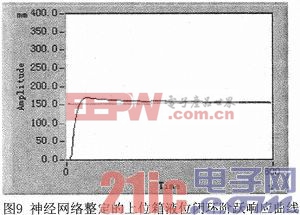
從上面實驗測得的響應曲線可以看出,采用神經網絡模糊自適應控制算法后,控制指標有了明顯改善,超調減小,穩態精度也得到了提高。更為重要的是神經網絡模糊自適應控制算法可以適應對象動態特性參數變化,并且可以在線自動整定,從而具有較好的應用價值。
3 結束語
網絡技術作為信息技術的代表,其與控制系統的結合將極大地提高控制系統的水平。網絡化控制技術作為控制、網絡和計算機多種技術交叉融合的產物,它的發展是控制系統日趨復雜化的體現,其理論基礎跨越多個學科,應用范圍遍及多個領越。作為一個新興的研究領域,網絡化控制系統很多問題的研究僅是一個開始,還存在著大量課題有待進一步的深化研究。
本網絡化模型裝置將以太網與傳統工業控制融合在一起形成新的控制網絡,在保證控制系統原有的穩定性、實時性等要求的同時,又增強了系統的開放性和互操作性,提高了系統對不同環境的適應性。








評論