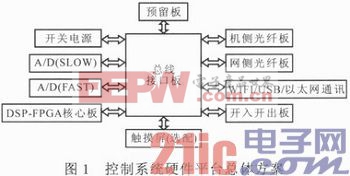
基于DSP與FPGA的雙饋式風(fēng)電變流器控制系統(tǒng)

4.2 網(wǎng)側(cè)變流器控制
網(wǎng)側(cè)變流器控制目標(biāo)是:保持輸出直流電壓恒定且有良好的動態(tài)響應(yīng)能力;確保交流側(cè)輸入電流正弦,功率因數(shù)為1。
在網(wǎng)側(cè)變流器控制中,由于電網(wǎng)電壓保持不變,所以這里采用基于電網(wǎng)電壓定向矢量控制技術(shù)。將三相靜止坐標(biāo)下的變流器模型轉(zhuǎn)換到兩相旋轉(zhuǎn)坐標(biāo)系下,并將交流側(cè)三相電流變換到d,q坐標(biāo)系下的電流分量id,iq進(jìn)行解耦控制,得:
udr=-udr’+△udr+us,uqr=-uqr’-△uqr (3)
式中:us為電網(wǎng)電壓;udr,uqr為變流器輸出d,q軸電壓分量。
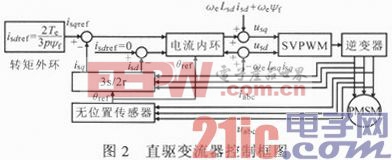
設(shè)計出網(wǎng)側(cè)PWM變流器控制模型如圖5所示。整個系統(tǒng)采用雙閉環(huán)控制,內(nèi)環(huán)為電流控制環(huán),外環(huán)為電壓控制環(huán)。電壓外環(huán)中,將直流環(huán)節(jié)實測電壓值與指令值做比較,誤差經(jīng)過PI調(diào)節(jié)器調(diào)節(jié)作為d軸電壓的指令值。電流內(nèi)環(huán)中,將實測電流的q軸分量與指令值做比較,誤差經(jīng)過PI調(diào)節(jié)器作為q軸電壓的指令值。將d,q軸電壓指令值變換到兩相靜止坐標(biāo)系下,得到電壓SVPWM的調(diào)制信號,以此來控制網(wǎng)側(cè)變流器。本文引用地址:http://www.104case.com/article/159278.htm
整個算法采用頂層文件設(shè)計方式,使用Verilog HDL語言編寫。通過A/D控制模塊控制ADS8364芯片進(jìn)行采樣,采樣得到的電壓、電流分別進(jìn)入Clarke變換模塊和三相鎖相環(huán)模塊。DSP通過PI調(diào)節(jié)器輸出的ud,uq,經(jīng)過Park變換后得到uα,uβ,并送入SVPWM模塊,進(jìn)行扇區(qū)判斷與矢量作用時間計算。由于調(diào)制過程可能出現(xiàn)過調(diào)制現(xiàn)象導(dǎo)致輸出電壓波形出現(xiàn)失真,因此加入采用比例縮小算法的過調(diào)制模塊,信號經(jīng)過調(diào)制后即可進(jìn)入比較模塊與三角波進(jìn)行比較輸出PWM波形,為防止上、下橋臂出現(xiàn)直通,加入死區(qū)控制模塊,死區(qū)時間由DSP控制;PWM脈沖分配模塊設(shè)置了死區(qū)時間的PWM輸出與保護(hù)信號進(jìn)行邏輯計算,保證在出現(xiàn)故障及過流時能及時封鎖脈沖,保護(hù)逆變器。
6 實驗驗證
2 MW雙饋變流器應(yīng)用于風(fēng)力發(fā)電系統(tǒng),交流電網(wǎng)電壓等級為690 V,額定中間直流電壓為1.1 kV,網(wǎng)側(cè)變流器額定容量670 kVA,轉(zhuǎn)子側(cè)變流器額定容量960 kVA。圖7示出直流電壓Udr;電網(wǎng)電壓、電流ug,ig;定子電流、電壓is,us實驗波形。
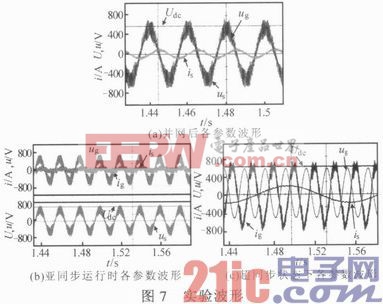
測試了滿載時的電流諧波畸變率(THD),此時發(fā)電機(jī)轉(zhuǎn)速1755 r·min-1,系統(tǒng)功率達(dá)2 150 kW,轉(zhuǎn)矩T=11 698 N·m,三相電流中最大的THD=2.94%,小于國標(biāo)的5%。
圖7a為定子并網(wǎng)后的波形,可見,并網(wǎng)后定子電流正弦度很高,說明該系統(tǒng)具有良好的并網(wǎng)特性,且并網(wǎng)對電網(wǎng)沖擊小;由圖7b可見,發(fā)電機(jī)轉(zhuǎn)速為1 200 r·min-1,功率為200 kW,此時發(fā)電機(jī)處于亞同步運行狀態(tài),可見該系統(tǒng)具有良好的穩(wěn)態(tài)特性;圖7c顯示了變流器在超同步狀態(tài)下,即1755 r·min-1時網(wǎng)側(cè)輸出感性無功功率,無功電流達(dá)到580 A,功率因數(shù)為0.949。
7 結(jié)論
通過自主研發(fā)的2 MW雙饋式變流器控制系統(tǒng)獲得了良好的并網(wǎng)波形以及穩(wěn)態(tài)后的電壓和電流波形,證實了網(wǎng)側(cè)和轉(zhuǎn)子側(cè)變流器控制策略的可行性。目前該系統(tǒng)已經(jīng)完成了整機(jī)測試,并在風(fēng)場進(jìn)行了試運行,受到一致好評。

fpga相關(guān)文章:fpga是什么
風(fēng)力發(fā)電機(jī)相關(guān)文章:風(fēng)力發(fā)電機(jī)原理 脈寬調(diào)制相關(guān)文章:脈寬調(diào)制原理 矢量控制相關(guān)文章:矢量控制原理
評論