基于速率的網絡擁塞控制H∞反饋控制器設計

為確保q(t)跟蹤qe(t)的穩態誤差為0,由上式有
式中:Ws(s)是靈敏度權函數,為使控制器Ke(s)出現0極點,同時為了保證E(s)在低頻段有較大的衰減度可取
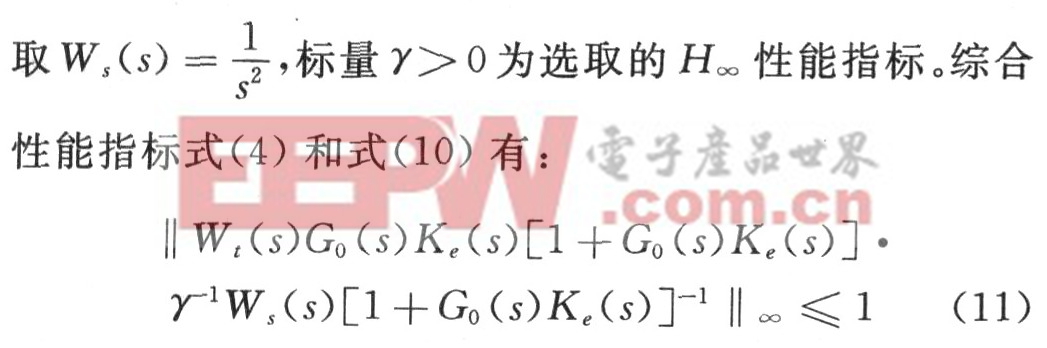
這即是一個工程應用中常見的混合靈敏度優化問題。考慮式(5),上述性能指標也可寫成如下形式:
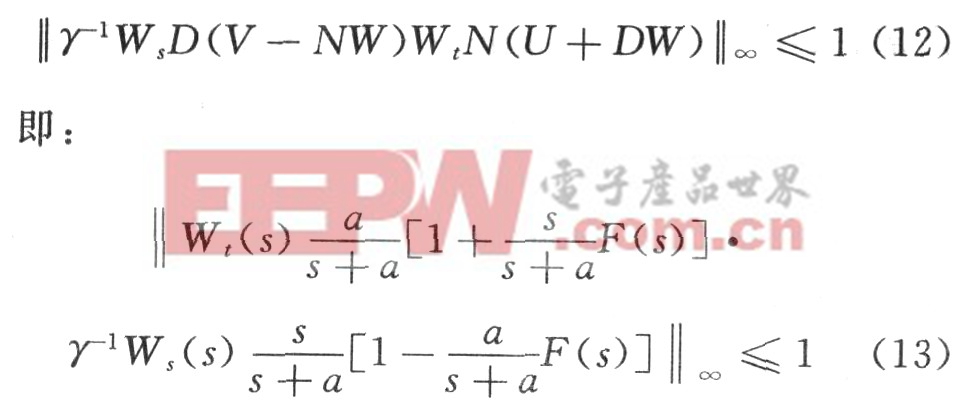
采用頻域整形方法根據式(13)可求取F(s),從而得到符合系統設計要求的擁塞控制H∞反饋控制器。
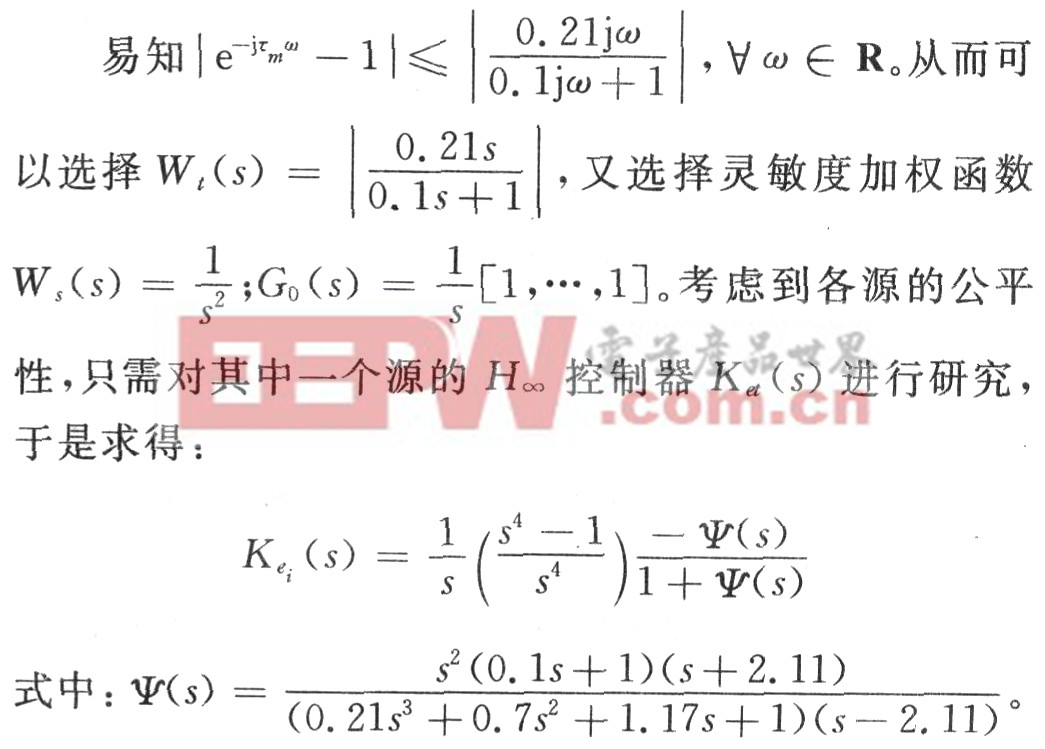
3 實例分析
設網絡擁塞控制系統瓶頸點輸出速率為c(t)=1 000+100sin(0.1t),t≥O;期望緩沖隊列長度為qe(t)=100;系統最大時滯為τm=0.1;H∞性能指標γ=1。
4 結 語
研究了多源單瓶頸網絡的擁塞控制魯棒H∞反饋控制器的設計問題,首先建立一個網絡擁塞控制系統的動態模型,然后進行H∞擁塞控制反饋控制器的設計,再對其性能要求進行分析,最后通過一個實例表明采用此方法設計的擁塞控制H∞反饋控制器較為簡單,且能有效達到防止擁塞及使網絡利用效率最大化的目的。










評論