基于CC2431的室內定位系統

定位引擎需要3~16個參考節點的坐標[x0,y0,x1,y1,…,x15,y15]作為輸入。參考節點的坐標表示每個參考節點的位置,是在[O,63.75]范圍內的無符號數值。最高分辨率為0.25 m。所有參考坐標被裝載入RF寄存器REFCOORD。在寫入寄存器REFCOORD之前,寄存器LOCENG.REFLD位必須置1以指示有1組參考坐標要寫入。16個坐標對都必須寫入,當定位引擎使用的參考節點數少于16個時,為了標記某些參考坐標未使用,將0載入作為未使用的參考坐標值,這些參考節點的RSSI值為O.O。當所有參考坐標寫入后,LOCENG.REFLD=0。定位引擎除了需要參考坐標外,還需要一組測量參數,這些參數包括:2個射頻參數A和n,4個搜索邊界坐標和16個RSSI值。定義參數A為距離發射機1 m參考距離下接收信號強度的絕對值,定位引擎要求參數A的范圍為[30.0,50.0],精度為0.5。參數A為無符號定點值,最后一位為小數位,其余位表示整數部分。參數n被定義為路徑損耗指數(描述信號功率隨著距離的增加而衰減的速率),這種衰減正比于d=n(d表示發射機與接收機之間的距離)。在估算定位x,y坐標時,先設定搜索邊界,以降低錯誤和估計時間,最大搜索區域的x,y范圍為[0.0,63.75]。假設定位引擎搜索被限制在一個矩形區域,坐標為(xmin,ymin)和(xmax,ymax),輸入定位引擎的4個搜索邊界參數為xmin,xdelta,ymin,ydelta,其中xdelta=xmax一xminydelta=ymax-ymin,如果選擇在整個可能的區域內搜索,則這4個參數值為:0.0,63.75,0.0,63.75。如果某個參數遺漏,則定位引擎無法正確地估算位置。RSSI值是對應于一組參考坐標的RSSI測量值,其范圍在[一40 dBm,一95 dBm],精度0.5 dBm,寫入時符號被去掉。如果使用的參考節點個數少于16個,則必須寫入0.O作為接收信號強的度值。所有測量得到的參數都裝載入RF寄存器MEASPARM。在寫入MEASPARM之前,寄存器位LOCENG.PARID必須置1,以指示有1組測量得到的參數要寫入。參數裝載過程開始后,所有22個參數都必須被寫入。測量得到的參數寫入順序為[A,n,xmin,xdelta,ymin,ydelta,RSSI0,RSSI1,…,RSSI15]。 當參考坐標和測量得到的參數寫入后,通過將寄存器位LOCENG.RUN置1啟動定位估計計算。當LOCENG.DONE置1時,估計得到的坐標可以從寄存器LOCX和LOCY中讀出。LOCENG.RUN置1到讀出估計坐標的時間間隔則根據搜索邊界參數的不同在50μs~13 ms之間變化。定位引擎不產生任何中斷請求。由LOCX寄存器給出的x坐標估計值包含一個偏移量,該偏移量必須被去除,以得到真實的x坐標。去除的方法如下:x=(xLOCX-xmin+1)%(xdelta+1)+xmin。可直接使用由LOCY寄存器給出的y坐標估計值。
2.2 CC2431定位系統的操作流程
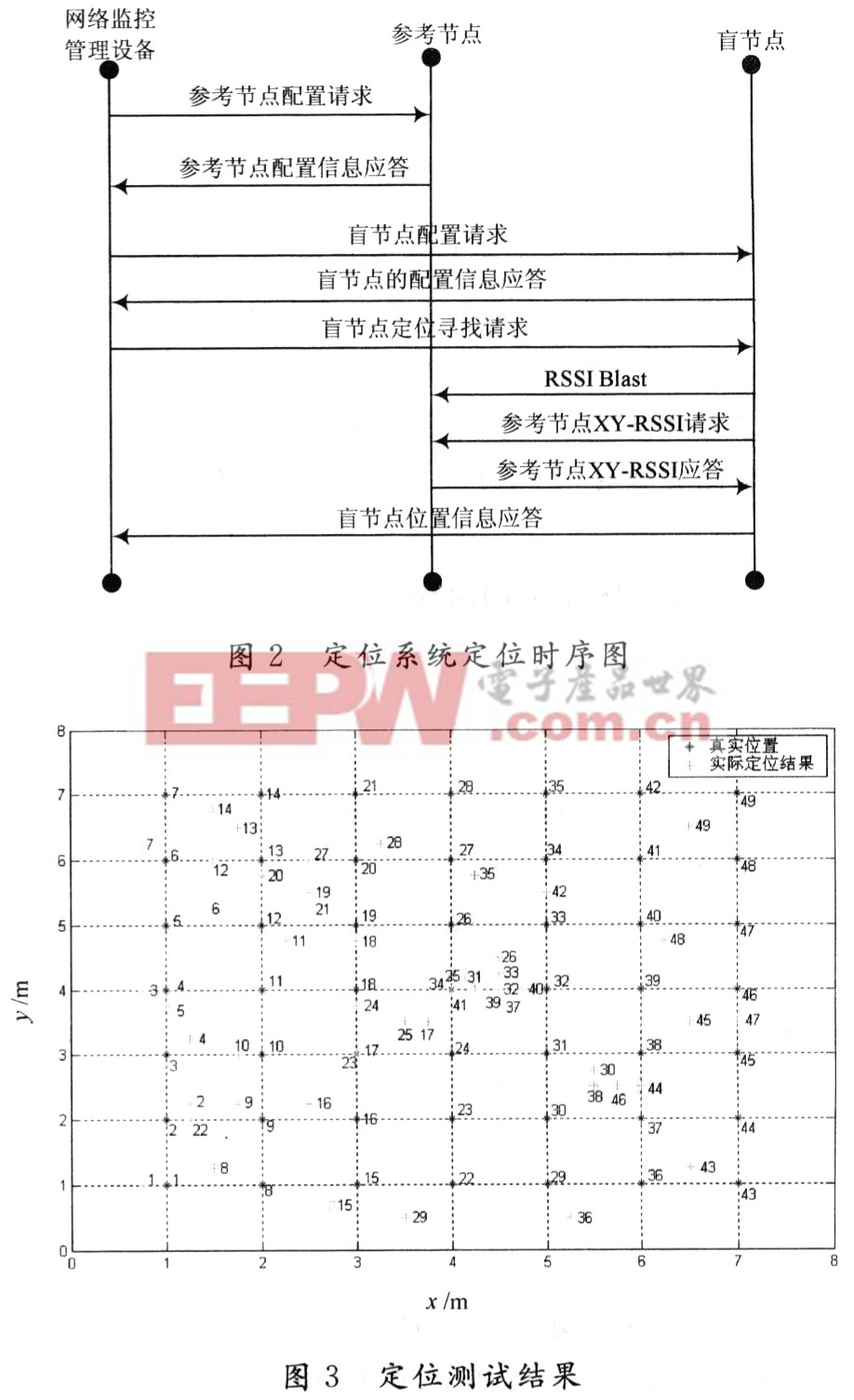
CC2431定位系統由網絡監控管理設備、參考節點與盲節點組成。其中,網絡監控管理設備使用串口發送和接收定位協議消息,它依附于主系統并且被用作匯聚節點接收盲節點響應、配置參考節點以及設置盲節點參數。當網絡監控管理設備應用程序接收到盲節點的響應信息時,通過串口把數據傳給主系統。盲節點包含CC2431定位引擎,定位引擎通過無線測距范圍內應答的參考節點坐標以及發送至這些參考節點信息的。RSSI值完成定位運算。盲節點首先發出一定時序的RSSIBlast信息廣播,當等待盲節點已配置完成規定的時間間隔后,盲節點向參考節點發出XY―RSSI請求廣播,每個接收到RSSI Blast信息廣播的參考節點將進行接收到信息的RSSI值計算,當接收到XY―RSSI請求時,參考節點將向盲節點發回其位置信息以及RSSI值。整個定位系統的定位時序圖如圖2所示。
3 實驗測試及驗證結果
這里以TI公司的CC2431節點作為實驗平臺,選擇8.O m×8.0 m的實驗室作為實地測試環境進行測試,在實驗室的4個墻角及中間位置布置了5個CC2431作為參考節點,其位置已知且固定不動。盲節點對均勻分布在測試環境內的49個點進行定位測試,定位結果如圖3所示:
根據獲取的待定位節點坐標實測數據,通過Mat―lab進行數據處理,以得到系統的定位誤差,定位誤差的分布如圖4所示:

由圖4曲線可以看出,在室內環境下,采用CC2431定位系統能夠分別實現50%和90%的定位,結果誤差前者在1.O m以內,后者在2.5 m以內,完全能夠達到室內環境下定位精度的要求。
4 結 語
首先比較目前已有的室內定位技術的優缺點,重點介紹CC2431定位引擎的使用方法和CC2431定位系統的定位流程。完成了定位系統的部署,定位結果令人滿意。CC2431能夠滿足低功耗、抗干擾、準確快速定位的要求,為室內定位提供具有競爭力的解決方案。








評論