基于CAN總線和Internet的分布式網絡監控系統

3.3can通信協議的制定
在can分系統里,報文結構采用can2.0b協議的標準幀結構。數據幀由7個不同的位場組成:幀起始、仲裁場、控制場、數據場、crc場、應答場、幀結尾。其中,仲裁場由11位標識符(id28~id18)和rtr位組成,依次從id28~id18發送,并且高7位(id28~id22)不能全是“隱性”。
根據can總線逐位仲裁原理和分布式監控系統各部分的特點,將仲裁場的11位標識符作以下設計。
(1)id28~id26定義為優先級。可規定0~7個級別,具有最高優先權的節點首先發送數據。當相同優先級別的報文同時發送時,繼續在仲裁域內往后進行逐位仲裁,直至有節點勝出為止。
(2)id25~id24規定為高低速can的標識。用來區分高速與低速can報文。其中00表示高速,01表示低速。
(3)id23~id18用于節點信號的分類,可留做具體組網時進行分配。本文引用地址:http://www.104case.com/article/157820.htm
4系統硬件設計
4.1can總線節點硬件電路設計
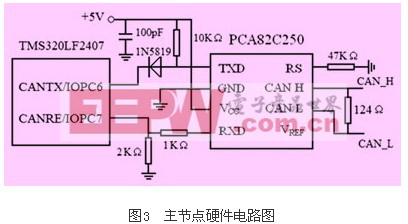
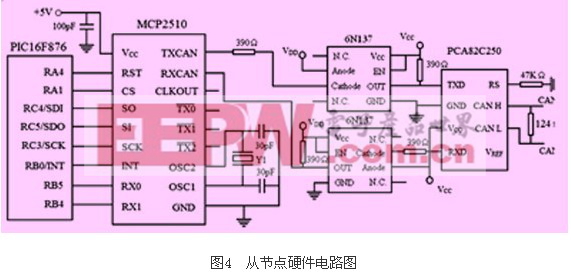
can總線硬件節點分主節點與從節點兩種。主節點為can網關,從節點分數據采集節點和控制節點兩種。由于can網關的數據處理量相對較大,采用ti公司內置can驅動器的dsp處理器tms320lf2407。數據采集節點和控制節點只需采集和處理與本節點相關的信息,故采用microchip公司的單片機pic16f876和can控制器mcp2510。pic單片機處理速度快,成本低,且具有極強的抗干擾能力,適合用在工業現場做數據采集和控制。主從節點硬件電路原理圖如圖3和圖4所示。
4.2internet通信網絡設計
internet節點使用普通的工控機,工控機可通過以太網卡與其它上位機和系統服務器進行通信,在此不做詳細介紹。
5系統軟件設計
系統軟件分為主程序、數據采集和處理、輸出控制和顯示、can總線通信等程序。數據采集又分為開關量掃描、模擬量采集、脈沖量采集等程序。can總線通信程序包括can初始化、數據發送、數據接收等。
5.1can節點主程序
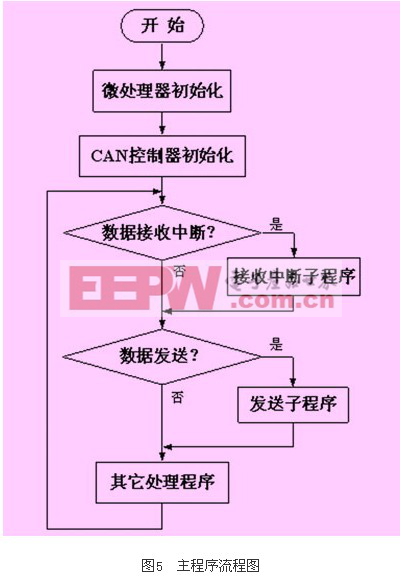
系統主程序主要包括微處理器初始化,can控制器初始化,數據的采集與處理和輸出控制和顯示等部分。系統主程序流程圖見圖5。











評論