基于DSP和CAN總線的RTU的設計

由于LF2407A 內部集成CAN 總線控制器, 因此不必外加CAN 控制器來實現CAN 總線的底層協議, 只需在CAN 輸出端子和物理通道之間加上抗干擾的光隔和CAN 總線收發器即可。光隔采用TI 的8 腳雙通道高速光隔HCPL2631 ,CAN 收發器選用PHILIPS 公司的具有多種保護和抗干擾能力的PCA82C250 差動驅動器作為總線接口, 為了更好的解決射頻干擾問題, 通信介質采用屏蔽電纜, 為了克服長線效應, 減小通信介質中信號的反射, 在傳輸線兩端并聯2 個120 Ω 的匹配電阻。
該通信主控模塊系統有多個串行口與外界進行數據通信, 通信實時性要求也較高, 利用通用的I/O 口線來構成串口在這里不適用, 選用具有四個異步通信單元的TL16C554A 芯片實現并-串轉換。由于PC、遠方通信端口都是RS232 端口, 同時為了能夠與傳統的485 設備兼容, 因此采用MAX232 芯片,MAX 1482 芯片將TL16C554A 串口輸出信號的TTL 電平轉化成RS232、RS485 電平。
為了保持通信主控模塊在功能上具有一定的獨立性, 選擇自帶T6963C 控制器漢字液晶顯示器模塊和4個按鍵一起構成人機接口界面。顯示器對系統的通信狀態進行顯示,4 個按鍵完成用戶功能的設定, 包括模塊的地址、各種通信端口的波特率等。X5045 是為了在系統掉電時將一些系統參數保存起來, 當系統再次起動時就可以重新調入這些數據。擴展的高速靜態RAM 作為外部數據存儲空間和調試程序存儲空間。
3 信號測控模塊的電路設計
信號測控模塊的主要采集對象有: 經過外部電壓和電流互感器轉化后的0~100 V 標準三相交流電壓和0~5 A 三相相電流; 反映變電站線路狀態及保護運行的開關量; 功率表脈沖量。按照信號的分類, 分別對應于模擬量、開關量和脈沖量。信號測控模塊的結構原理如圖3所示。
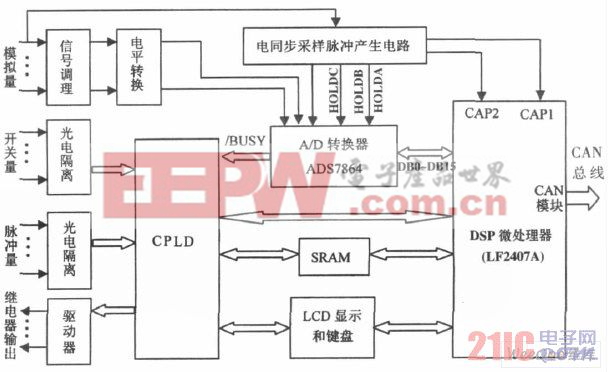
圖3 信號測控模塊的結構原理圖
為了保證模擬量測量的精度和實時性, 對于模擬量的測量采用交流采樣和硬件電路同步的方法。硬件同步和頻率采樣電路主要由遲滯電壓比較電路、高速光藕、鎖相倍頻電路和脈沖整形電路組成。遲滯比較電路將交流正弦波輸入信號變為0 ~5 V 的同頻率方波信號, 高速光耦6N137 將模擬部分和數字部分電路隔離開,鎖相倍頻電路由鎖相環電路CD4046 和三片可編程計數器芯片MC14522 構成128 倍頻器,使輸出信號頻率為正弦輸入信號頻率的128 倍,并且跟隨輸入同步變化。MC14522 輸出的同步信號經分壓后, 被送入TMS320LF2407A 的捕獲模塊CAP1、CAP2 用于頻率的測量。CD4046 輸出的同步倍頻信號經脈寬整形后得到合適的脈沖信號,接A/D轉換器ADS7864 的/HOLDA、/HOLDB、/HOLDC, 選擇輸入的多路開關并且啟動A/D 轉換。ADS7864 是一塊高速(2 μs)、低功耗(50 mW)、單電源(+5 V)工作的雙12 位A/D轉換器。它能以500 kHz 的采樣速率同時進行6 通道信號采樣, 特別適用于電力監控系統。ADS7864 的6 路輸入通道可分成3 對, 測量電力監控應用的三相, 并將模擬信號轉換成LF2407A 所需的數字信號, 存放在片內6 個FIFO 寄存器中。為了提高系統的效率, 將ADS7864 的//BUSY信號接至CPLD, 由其判斷ADS7864 產生三個/BUSY 信號后產生一個中斷, 通知LF2407A 一次性讀走ADS7864 的FIFO 中6個轉換好的數據進行處理。另外,ADS7864采用雙極性(±5 V) 的輸入, 由于輸入的交流電壓信號為0~100 V, 電流信號為0~5 A, 因而需要加上信號調理和電平轉換電路。










評論