基于WiFi的RFID可擴展AMR車位檢測系統

系統數據傳輸的數據幀由幀頭和幀類型組成,幀頭結構如圖7所示。
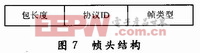
包長度(8 b)表示從一個字節開始到幀結束的字節數;協議ID(8 b)用于區分協議的功能;幀類型(8 b),不同的幀類型有不同的幀格式。
幀類型主要有三種類型,AMR傳感器節點數據包(32 b)/RFID讀寫器數據包(32 b)采用廣播方式,設備命令包(32 b)采用點對點方式。
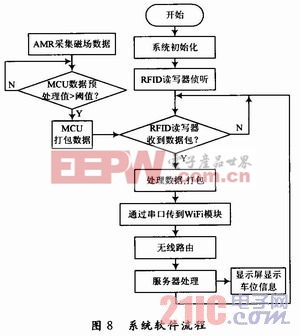
2.2 系統軟件設計
檢測系統程序設計使用模塊化程序設計方法,由傳感器節點和RFID閱讀器組成。系統軟件流程如圖8所示。
3 系統測試結果與討論
系統在某中型停車場中進行了測試,測試記錄如表1所示。測試結果表明,系統正確檢測出車輛在95%左右。由于傳感器是根據車輛對地磁場擾動的原理來檢測車輛的存在,而車輛的不同構造和材質對地磁場的擾動情況不一樣,因此會引起AMR傳感器的誤檢和漏檢。基于這樣的情況需要在車輛離開車位后對傳感器的閾值進行重新標定。

無線傳感器網絡技術和RFID技術作為近年新興的檢測和識別技術,在物流管理和智能感知中得到快速的發展。本文所設計的基于WiFi的RFID可擴展AMR車位檢測系統,具有運行可靠、實時性強、布線少、能耗低和可擴展性強等特點,對提高停車場智能管理的智能化、無人化方面具有一定的意義。









評論