無線傳感網絡時間同步研究進展與分析

摘要:簡要闡述近年來無線傳感網絡時間同步算法的發展情況和影響無線傳感網絡時間同步的因素后,重點介紹了目前幾種比較典型的時間同步算法,并對其精度、功耗以及各自的優缺點進行了較詳細的分析。在特定的網絡中,應該對精度與功耗進行折中考慮。最后探討了未來可能的發展方向。
關鍵詞:時間同步;典型時間同步算法;誤差分析
引言
保持節點之間時間上的同步在無線傳感器網絡中非常重要,它是保證數據可靠傳輸的前提。NTP協議是目前因特網上采用的時間同步協議標準,功耗大,采用有線傳輸,不適合用于功耗、成本受限制的無線傳感網絡中。GPS系統也可以提供高精度的時間同步,但它的信號穿透性差,GPS天線必須安裝在空曠的地方,功耗也較大,所以不適合無線傳感網絡。
Elson等人2002年首次提出無線傳感器網絡時間同步的研究課題以來,已有相當多的典型時間同步算法,主要可以分為以下幾類:基于發送者一接收者的雙向同步算法,典型算法如TPSN(Timing-Sync Protocol for Sensor Networks)算法;基于發送者一接收者的單向時間同步算,典型算法如FTSP(Flooding Time Synclaronization Protocol)算法、DMTS(Delay Measurement Time Synchronization)算法;基于接收者一接收者的同步算法,典型算法有RBS(Reference Broadcast Synchronization)算法。
近年來根據以上幾種典型同步算法,還有人提出了分簇式的層次型拓撲結構算法,以及結合生成樹等來提高整個網絡的性能,如LTS(Li-glatweight time synchronization)算法、CHTS(Cluster-based Hierarehical Time Synchronization)算法、CRIT(Chained-Ripple Time Synchronization)算法、PBS(The Pairwise Broadcast Synchronization)算法、HRTS(Hierarchy ReferencingTime Synchronization Pro-toc01)算法、BTS(Broadcasttime synchronization)算法、ETSP(Energy-efficient Time Synchronization Protocol)算法等。
然而,無論以上同步算法怎樣發展,精度如何提高,整個網絡功耗怎樣降低,都是基于單跳時間同步機制。隨著無線傳感網絡的運用與發展,傳感節點體積不斷縮小,單跳距離變小,整體網絡規模變大,同步誤差的累積現象必將越來越嚴重,目前也有比較新的同步算法,試圖盡量避開單跳累加來解決這些問題,如協作同步。
1 時間同步
1.1 時間同步不確定性的影響因素
時間同步不確定性的主要的影響因素如圖1所示。
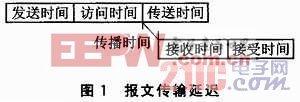
發送時間:發送方用于構造分組并將分組轉交給發送方的MAC層的時間。主要取決于時間同步程序的操作系統調用時間和處理器負載等。
訪問時間:分組到達MAC層后,獲取信道發送權的時間。主要取決于共享信道的競爭、當前的負載等。
傳送時間:發送分組的時間,主要取決于報文的長度等。
傳播時間:分組離開發送方后,并將分組傳輸到接收方之間的無線傳輸時間。主要取決于傳輸介質、傳輸距離等。
接收時間:接收端接收到分組,并將分組傳送到MAC層所需的時間。接受時間:處理接收到分組的時間。主要受到操作系統的影響。
1.2 典型時間同步算法分析
1.2.1 TPSN算法分析
TPSN算法采用的是層次型的網絡結構,是基于發送者一接收者的雙向同步算法。分成兩個階段,第一階段為層次發現階段,第二階段為同步階段。T1、T4用來記錄同步節點的本地時間,T2、T3用來記錄參考節點的本地時問。同步節點A在T1時刻向參考節點B發送一個同步請求報文,報文中包含了同步節點的級別和T1。當參考節點B收到報文后,記錄下接收時刻T2,并立即向同步節點A回復一個同步應答報文,該報文中包含了參考節點B的級別和T1、T2及回復時刻T3。同步節點A收到參考節點的回復后,記下時刻T4。假設來回報文的傳輸延遲相同都為d,且m為同步節點在T1時刻兩者之間的時偏,且設來回時偏相同,由T2=T1+m+d,T4=T3-m+d可得到:
![]()
則在T4時刻,若在同步節點A的本地時間增加修正量m,就能達到同步節點A與參考節點B之間的同步。




評論