基于CAN總線的客車信息集成系統的設計

3.2 網關與總線接口
網關選用philips公司lpc2101微控制器,它是一款基于支持實時仿真的arm7tdmi-s cpu,并帶有8kb和32kb嵌入的高速flash存儲器。128位寬度的存儲器接口和獨特的加速結構使32位代碼能夠在最大時鐘速率下運行。這可以使得中斷服務程序和dsp算法中重要功能的性能較thumb模式提高30%。對代碼規模有嚴格控制的應用可使用16位thumb模式將代碼規模降低超過 30%,而性能的損失卻很小。它內部集成2個can控制器,主要特性有:單個總線上的數據傳輸率高達1mb/s;32位寄存器和ram訪問;兼容 can2.0b;全局驗收濾波器可以識別所有的11位和9位rx標志符;驗收濾波器為選擇的標準標志符提供full can style自動接收。
can收發器選用philips公司的tja1050接口芯片,tja1050可以為總線提供差動發送性能,為can控制器提供差動接收性能。
lpc2101微控制器分別通過光電耦合電路和高速can總線收發器tja1050于兩路can總線相連。兩路 can的連接方式基本相同,can總線驅動器都采用帶隔離的dc/dc模塊單獨供電。這樣不僅實現了兩路can接口之間的電氣隔離,也實現了網關與can 總線的隔離。網關與總線結構如圖3所示。
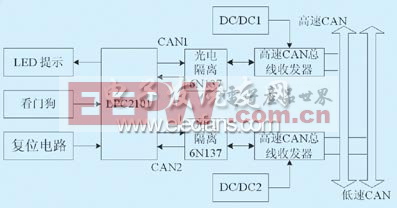
圖3 網關與can總線接口結構
can/can網關的主要功能是實現兩路can網段之間的數據過濾及轉發,由于城市客車信息集成控制系統中對通訊實時性的要求,在進行軟件設計時要做到數據存儲和轉發的時間盡可能短。為了達到這一要求,數據的接收采用irq方式,而且由于動力總成控制子系統的數據通信量明顯高于車身控制子系統,因此將連接動力控制總成子系統的can1接受優先級設置最高,而連接車身控制子系統can2優先級次之,同時盡量精簡中斷服務程序,使系統的響應時間盡量的短。
由于傳輸速率不同,高低速can網絡之間的數據傳輸是不同的。當高速can網絡數據向低速can傳輸時,需要加入軟緩存進行暫時的存儲;當低速can網絡數據向高速can網絡傳輸時,可直接傳輸。整體流程如圖4所示。

圖4 高低速can網關通信流程
5 結束語
can總線以其高性能、高可靠性及其獨特的設計越來越受到人們的重視,并被公認為是汽車控制網絡中最有前途的總線之一。本文給出了一個具有高低速can網絡的城市客車信息集成控制網絡的設計方案,介紹了lpc2101微控制器在該can網絡中作為高低速網關的軟硬件設計。汽車計算機控制單元能夠通過can總線共享所有信息和資源,達到簡化布線、減少傳感器數量、避免控制功能重復、提高系統可靠性和維護性、降低成本、更好地匹配和協調各個控制系統的目的。

tcp/ip相關文章:tcp/ip是什么









評論