一種便攜式無線搜救定位系統設計方案

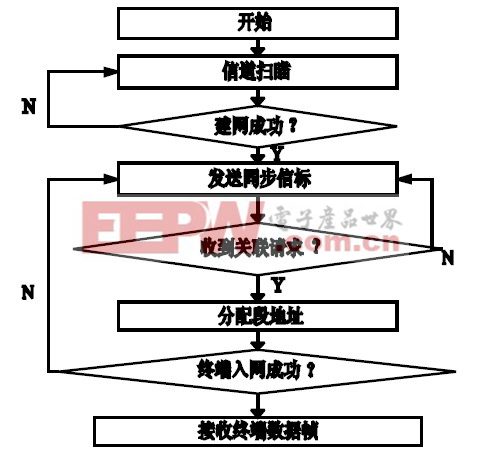
圖3 協調器流程圖
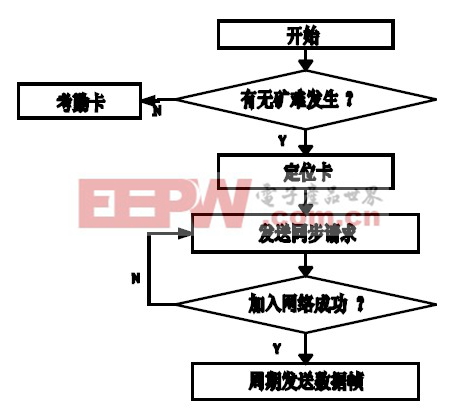
圖4 終端流程圖
2.4 BI 和SI 的動態設定調度算法
無線搜救器在搜尋遇難者的時候需要收集大量的RSSI 值來進行定位,這就意味著網絡的通信非常繁忙。
一般的網絡對于信標間隔(BI)和超幀活動區間(SD)都是設定為定值的,但是在通信繁忙的時候協調器或路由器就有可能因為其傳輸的數據量大,而其超幀活動區間又比較小,有可能引發數據包丟失等情況,從而成為網絡數據傳輸的瓶頸。本系統從實際實驗出發,采取了一種動態設定BI 和SI 的方法,流程如圖5 所示。
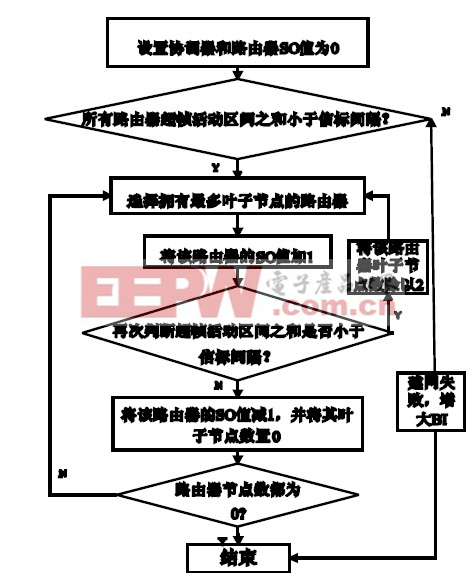
圖5 算法流程圖
3 實驗結果分析
在Zigbee 網絡的幾種拓撲結構中,簇-樹狀拓撲具有建網迅速,節點加入網絡成功率高以級路由途徑多等特點,并且具有網絡自愈功能,且因路由器具有數據轉發能力,可實現更大數據量的傳輸,所以在實驗中,我們將射頻卡的類型全部設置為路由器,拓撲結構為簇-樹狀拓撲。通過Packet Sniffer CC2430IEEE802.15.14 軟件跟蹤的數據幀中每幀字節數計算出在每個超幀活動區間內終端傳輸的數據量,下面是BO 和SO 為定值與動態設定BO 和SO 值兩種情況下的數據傳輸量的對比:
表1 傳輸數據對比表

由表1 可知,在動態設定BO 和SO 值時,可顯著增大傳輸數量,從而大大增加定位時的精度和搜救器的靈敏度。
在采取動態設定BO,SO 值方法時,對無線搜救系統的精度和靈敏度進行實驗可得:當無線搜救器距離終端射頻卡45 米左右便可搜索到終端卡的信號,此時定位誤差在3 米以內,隨著兩者之間距離的接近,定位誤差相應減少,在20 米左右定位誤差可控制在1米以內,考慮到這是在實驗狀態下得出的結論,在實際應用中因各種環境的干擾,靈敏度與定位精度都會有所下降,但是一般礦山中的甬道的長度大部分都是在10 多米左右,定位誤差在0.7 米左右。綜合以上實驗數據,該無線搜救器系統是可以滿足實際工程當中的應用的。
4 結語
通過采集各個射頻終端卡的RSSI 值,實現了定位和搜救功能,并利用動態設置BO,SO 的方法,創新性的運用到無線搜救領域,最優化了信標間隔,解決了數據傳輸瓶頸的問題,從而間接的提高了定位的精度和靈敏度。在此設計基礎上,定位的精度和節點穿透能力還需要做進一步的完善和研究。
蜂鳴器相關文章:蜂鳴器原理





評論