UHF RFID系統中直接解碼碰撞的新方案

摘要:通過改造UHF RFID系統中標簽的隨機碼生成器,重新設計隨機碼模式,并為RFID閱讀器添加碰撞解碼系統,改善碰撞時隙,使相撞的多個隨機碼可被直接解碼,系統的性能顯著提高。在基于GNU無線電和USRP2的實驗平臺實現此方案以驗證其可行性。理論分析和測試平臺的實驗結果表明,標簽讀取率較傳統方案有顯著提高。
關鍵詞:超高頻射頻識別;碰撞;直接解碼;GNU無線電和USRP2
0 引言
超高頻射頻識別(UHF RFID)是一種新興的無線技術,它使得微機芯片能夠遠程供電和對標識符及其他信息進行操作。RFID是“物聯網”的關鍵技術之一,由于其應用多樣化已日益普及,如庫存控制和定位。常使用的RFID的標準之一是EPC Globle Class 1 Generation 2(簡稱EPC Globle C1G2)。根據EPC標準,多個標簽可以在分幀時隙ALOHA算法下進行訪問通道。以前的工作主要集中在研究更有效的算法來找到最佳的幀長來調整系統參數,以提高RFID系統的效率。這些方案的效率都約束于ALOHA算法理論吞吐率上限36.8%。
本文提出了一種直接解碼碰撞(Directly Decoding the Collisions縮寫為DDC)增加RFID系統吞吐率的實用設計。其原理是減少固定長度隨機碼所攜帶的信息量使得它們能夠同時傳送。如果有幾個隨機碼在同一個時隙發生碰撞,此方案能夠達到和只收到一個隨機碼相同的性能,同時利用更有效的標簽數估計算法得到相撞標簽的數量。這種設計新的隨機碼模式和能夠解碼碰撞的隨機碼的方案突破了ALOHA算法理論上限的約束。
1 直接解碼方案體
1.1 初始調制
此方案重點在于RFID系統中的FM0基帶和二進制移相鍵控(BPSK)調制。為了通過無線信道傳輸隨機碼,標簽映射位映射到基帶碼,然后通過調制把基帶碼映射到復合信號。
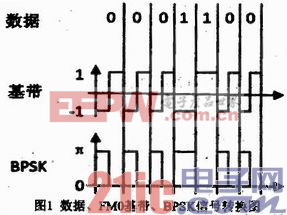
如圖1所示,FM0基帶使用兩個不同的符號(-1,1)或(1,-1)代表0位,并使用兩個相同的符號(-1,-1)或(1,1)代表1位。基帶編碼是獨立于調制方法的。基帶編碼轉化為模擬信號,BPSK調制中,1映射為余弦載波波形cos(2πfct+0),-1映射為反余弦載波波形cos(2πfct+π)。其中fc是載波頻率,在UHFRFID系統它通常是915MHZ左右。無線信號通常表示為離散復數,實部表示為I,虛部表示為Q。這使得載波相位變化設計簡化。載波可以由式(1)表示。
Acos(2πfct+[t])=Icos(2πfct)+Qsin(2πfct) (1)
符號θ[t]表示載波相位,在BPSK調制中可取0或θ,符號i表示虛數單位,復數的實部是I=Acosθ[t],虛部是Q=Asinθ[t]。I和Q組成一個復數用來在兩個無線終端之間傳輸和接收。
1.2 標簽端
我們使用θ[t]來表示在物理層中第t個傳輸信號,t=1T,2T……,nT和此信號的采樣間隔是T。將信息添加到隨機碼,我們采取了1的位或多個1要替換一個或多個0位的位數。這種替換的基本規則是不改變其他位的波形形狀,例如,在FM0基帶,我們需要把兩個連續的0更換為兩個連續的1位。實驗結果表明,例如曼徹斯特解碼的大部分的數據編碼方法通過限制使用“1”位可以達到這一要求。最后我們有式(2)來表示標簽的位串。
x[t]=b[t]+ξ[t] (2)
其中b[t]表示基信號,例如己知首段與尾端的連續位0。這里的重點是,b[t]的數據是已知的。為了攜帶數據,我們加入ξ[t],這樣,ξ[t]的開始位置是信息的關鍵。如圖1所示,信號電平中1表示為ξ[t],連續的0表示為b[t]。在一個典型的UHF RFID系統,標簽傳送一個隨機碼,這個隨機碼有已知的開頭和結束信號。基信號b[t]可以編排成任何已知的形式。加權式ξ[t]可以插在b[t]中的任何位置,但也改變不了b[t]的形式。
1.3 閱讀器端
經過無線通道后,信號振幅和相位發生變化,在這里,接收到的信號表示如下:
y[t]=Hx[t]+G[t] (3)
H表示傳輸信號接收信號之間的相位變化和振幅衰減相疊加出的復數,G[t]是隨機噪聲。當閱讀器收到兩個碰撞的隨機碼,收到信號表示如下:
y[t]=H1x1[t]+H2x2[t]+G[t] (4)
或
y[t]=H1b[t]+H1ξ1[t]+H2b[t]+H2ξ2[t]+G[t] (5)
應當指出,上述公式并不意味著這兩個隨機碼的第n個取樣是重疊的,我們只是使這個公式討論起來更加清晰。這兩個隨機碼有著相同的基信號b[t],這個基信號可以通過推算振幅和相位偏移量相減得到。相減后,我們得到式(6)。
y[t]=H1ξ1[t]+H2ξ2[t]+G[t]H (6)
H的制約條件能夠通過構建步驟估計出來,并且可以看成是已知樣本,至于ξ1[t]和ξ2[t],只要它們所在的兩個標簽沒有發生碰撞,就能夠通過推算樣本偏移量和振幅來解碼ξ1[t]和ξ2[t]。
1.3.1 振幅估計
在第一次收到的隨機碼的開頭一般都有無碰撞符。無碰撞符也是程序開始位。我們可以通過首個RN的無碰撞符來估計振幅。我們收到的是復數y[t],首次無碰撞復數的振幅可以表示為:
![]()
I1和Q1都可以通過無碰撞符精確地推算出來。第二個隨機碼的振幅可以從碰撞的尾端數據估計出來。上面公式是常見案例中的振幅估測的通常形式。碰撞部分的振幅可以用式(8)表示。
![]()

評論