基于WiFi的遠程視頻傳輸智能機器人設計

線性穩壓器具有輸出電壓恒定或可調、穩壓精度高的優點,但是由于其線性調整工作方式在工作中會造成較大的“熱損失”,導致其電源利用率不高、工作效率低下,不易達到便攜式設備對低功耗的要求。因此為保證較高的電源利用率,舵機驅動采用LM2596開關型穩壓芯片實現,它可以提供3 A以上電流,驅動強勁。圖3給出了舵機驅動方案。本文引用地址:http://www.104case.com/article/153531.htm
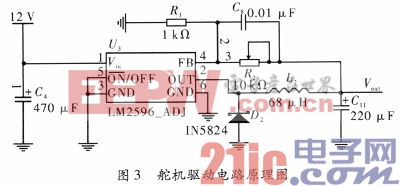
由于舵機型號為MG995,其工作電壓為5.0 V~7.0 V。因此舵機驅動芯片選擇了可調LM2596-ADJ芯片,其輸出電壓Vout=Vref(1.0+R2/R1),其中,Vref=1.23 V為芯片內部參考電壓。
3 軟件設計
軟件部分是機器人智能化的體現,它控制WiFiRobot所有的運行狀態。整個軟件系統體系結構如圖4所示。
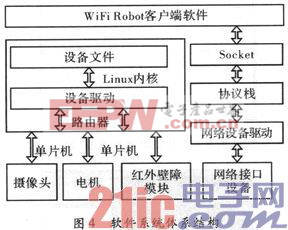
操作系統采用OpenWrt,此部分在路由器刷機部分完成,主要完成視頻采集、數據傳輸、轉發等功能。上位機軟件控制燈光控制、拍照、實時控制機器人運動等行為。下位機軟件通過接收來自上位機的命令,從而執行相應操作。而連接上位機和下位機之間的紐帶就是通信協議,軟件部分包括通信協議,客戶端控制軟件和下位機軟件。在此主要介紹通信協議和上位機的開發。
3.1 通信協議
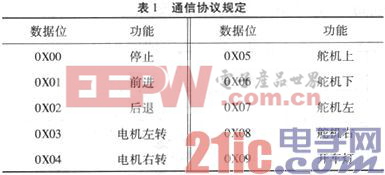
上位機采用數據包格式傳送指令,也可以采用單字符的形式發送,由于單字符通信方式干擾較大,因此采用數據包格式傳送指令,包頭用OXFF,包尾用OXFF,無校驗位。上位機利用無線網卡通過Socket發送數據包到路由器,路由器通過解包機制把數據包解開,通過串口發送到單片機并通過控制模塊執行相關操作。其協議規定如表1所示。

路由器相關文章:路由器工作原理
路由器相關文章:路由器工作原理








評論