基于嵌入式Windows CE5.0的無線監控系統研究

2.2 GPRS模塊的接口設計
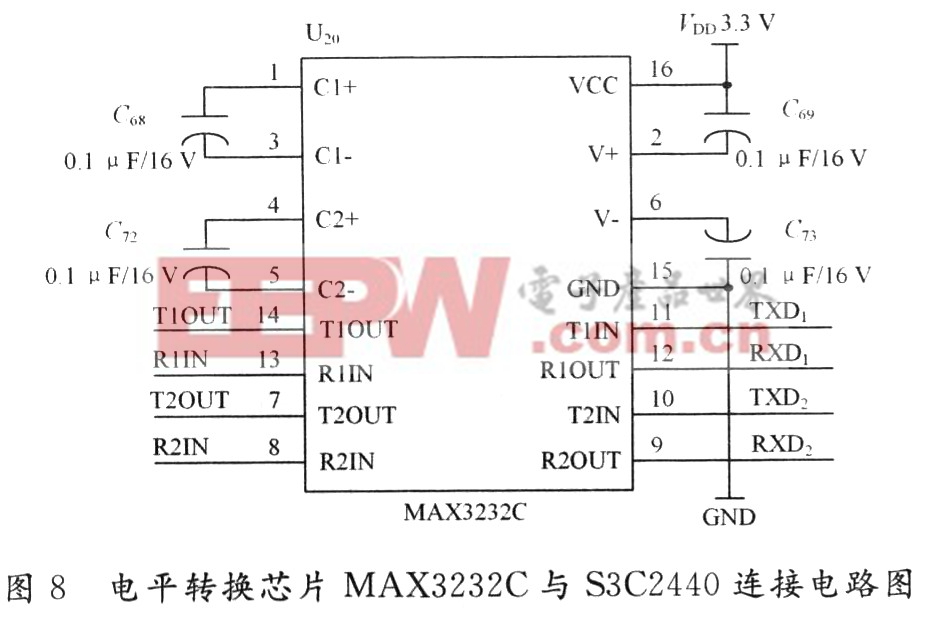
S3C2440有3個UART通道,利用其中一個通道設計串口,使其與GPRS模塊連接,由于S3C2440自帶的UART控制器,使得硬件開發和軟件設計都比較簡單。但RS 232標準所定義的高、低電平信號,與一般的微控制器系統的電路所定義的高、低電平信號完全不同,如S3C2440系統的標準邏輯“1”對應電平2~3 V,標準邏輯“O”對應0~4 V電平。顯然,與RS 232標準所述的電平信號完全不同。兩者之間要進行通信,必須經過信號電平的轉換,目前常使用的電平轉換芯片有MAX232,MAX3221和MAX324.3,具體設計電路如圖7和圖8所示。本文引用地址:http://www.104case.com/article/152523.htm
3 操作系統平臺的定制
Windows CE是高度模塊化的嵌入式操作系統,正因為如此,用戶為了滿足特定的要求而對操作系統進行定制,如果為自己的嵌入式設備定制Windows CE操作系統,則須進行創建、構建、運行和發布OS等一系列操作。在無線視頻監控系統中,根據功能要求,利用Platform Builder5.0定制系統的流程如下:
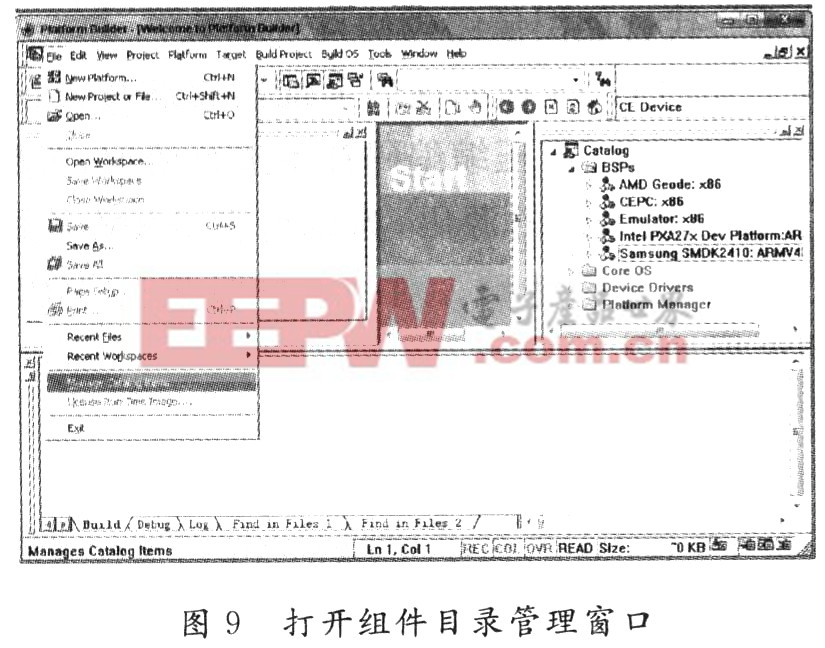
(1)導入BSP開發包。由于用的是三星公司的基于ARM920T核的S3C2440,所以在BSP包中找到SMDK2440文件下的SMDK2440.CEC文件將其導入。打開“Platform Builder5.0”,選擇“File”菜單下的 “Manage Catalog Features”,如圖9所示。在彈出的對 話框中單擊“Import”,瀏覽到SMDK2440文件下的 smdk2440.cec文件,將其導入。
(2)創建項目。根據WinCE無線監控系統的要求,在定制系統的過程中選擇合適的組件來實現。其中包括的組件有:支持應用程序開發的MFC組件和支持網絡的相關組件等。
(3)編譯項目:點擊菜單“Build OS”→“Sysgen”開始編譯項目。
(4)下載運行時映像,調試成功后啟動。編譯成功后會在目WinCES00PBWorkspacestestlRelDirsmdk2 440_ARMV4I_Release下生成nk.bin和nk.nb0等文件,將nk.nb0下載到硬件平臺上運行。
4 驅動程序的開發
4.1 攝像頭驅動的開發
攝像頭驅動開發是設計中的一個難點,也是一個關鍵部分。由于攝像頭采集的視頻數據可以當作數據流來處理,所以對于攝像頭的驅動將采用流式接口的方法來開發。
(1)在Platform Builder中打開前面定制的操作系統工程,然后在新建一個WIN32 DLL項目,添加2個C++的源文件,即:camera.cpp和IIc.cpp,其中camer―a.cpp包含驅動的入口函數DLLMain();驅動的前綴為“CIS”,IIc.cpp包含通過ICC接口對攝像頭相關寄存器進行配置的函數。
(2)根據前面的硬件電路和OV9650芯片的工作時序,通過編寫流接口的CIS_Init函數實現OV9650初始化。主要包括以下3步:調用InterruptInitialize(SYSINTR_CAM,CameraEvent,NULL,0)函數通知系統注冊中斷;調用CreateEvent()函數創建一個CameraEvent事件;調用CreateThread()函數創建CameraThread線程。在Camera Capture Thread服務函數中調用WaitForSingleObject(CameraEvent,Dis―play Time)函數等待Camera Event事件的發生。此事件由與其關聯的SYSINTR_CAM中斷來觸發。此外還有其它流接口函數(CIS_IOControl等)也可以以類似的方法實現。
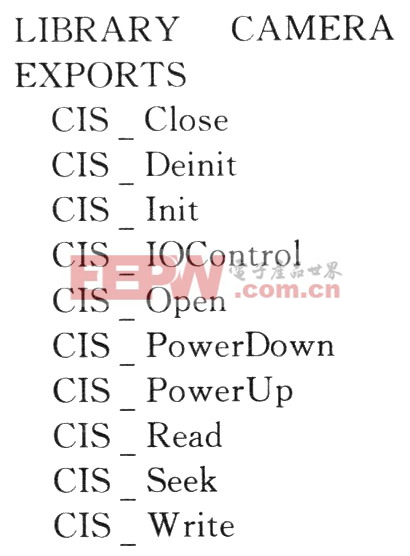
(3)編寫DLL的導出函數定義文件.DEF。.DEF文件定義了DLL的導出函數類表。.DEF文件可以就用一般的記事本編輯,保存時后綴名改為.DEF即可,關于本攝像頭驅動的.DEF文件內容如下:
(4)為驅動程序配置注冊表。在platform.reg中添加以下注冊項即可:

在攝像頭驅動開發完成后,通過編寫應用程序在嵌入式終端的觸摸屏上顯示出來,如圖10所示。首先通過CreateWindow這個API函數創建一個用來顯示圖像的窗體,然后創建回調函數CaptureThreadProc的線程,在回調函數中根據不同的操作向操作系統發送不同的消息值,處理圖像的讀取、顯示等。測試結果如圖11所示。

4.2 串口驅動開發
linux操作系統文章專題:linux操作系統詳解(linux不再難懂)








評論