基于DSP/BIoS設備驅動模型的視頻驅動程序開發

通常,首先利用FVID_create函數完成分配并初始化通道對象,返回值為設備實例句柄,這個句柄用于后續其他FVID函數調用這個已經創建的通道。然后調用FVID_control函數向微型驅動發送控制命令,如配置編解碼器,發送開始采集或顯示圖像的控制命令。然后利用FVID_alloc分配緩沖區,接著應用程序將緩沖區的數據進行復制的搬移工作,當應用程序完成對緩沖區數據的采集后,調用FVID_exchange來交換緩沖區,保證視頻數據能夠實時地、源源不斷地供應用程序使用。
過程的流程圖如圖5所示。 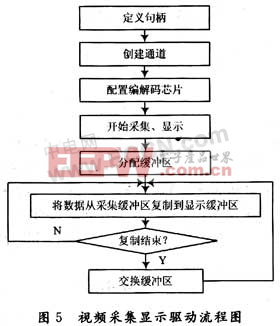
下面是簡單的視頻采集顯示驅動的部分實現代碼:
3 結 語
本文介紹了基于TI公司的類/微型驅動模型進行視頻驅動設計的原理及主要方法,利用這兩層的驅動模型不僅簡化了驅動程序的編寫過程,縮短了開發時間,而且使代碼的復用性和可移植性大大提高,稍加改動相應的底層接口就可以用于其他的DSP系統中,真正使視頻驅動的開發過程得到簡化。
主站蜘蛛池模板:
尚志市|
阆中市|
江都市|
广南县|
甘南县|
桐梓县|
玉树县|
郯城县|
稻城县|
紫云|
黎城县|
漠河县|
肃宁县|
繁昌县|
本溪市|
阳曲县|
浑源县|
三江|
鄂伦春自治旗|
沙坪坝区|
龙州县|
洪泽县|
杭锦后旗|
和硕县|
蓝山县|
黄浦区|
察隅县|
泰安市|
安国市|
和平县|
东城区|
辉县市|
石家庄市|
东源县|
林芝县|
永登县|
额济纳旗|
遵义县|
吴旗县|
桓仁|
禄丰县|












評論