Small RTOS51 下CAN總線數(shù)據(jù)收發(fā)實(shí)現(xiàn)

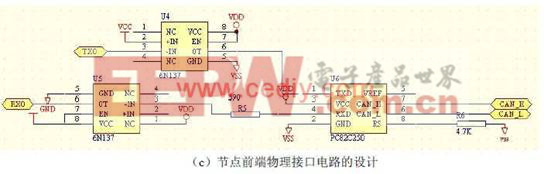
(c)節(jié)點(diǎn)前端物理接口電路的設(shè)計(jì)
使用SJA1000 CAN總線控制器可完成CAN總線通信任務(wù),但它的驅(qū)動(dòng)能力不夠,因此外接82C250總線驅(qū)動(dòng)芯片。82C250是CAN控制器和物理總線間的接口。之所以選擇82C250芯片是因?yàn)槠渚哂懈咚傩裕ㄗ罡呖蛇_(dá)1Mbit/s),具有抗瞬間干擾保護(hù)總線的能力。具有降低射頻干擾的斜率控制。此外,它可以與110 個(gè)節(jié)點(diǎn)相連,防止電池與地之間發(fā)生短路,當(dāng)某一個(gè)節(jié)點(diǎn)掉電時(shí),不會(huì)影響總線。
(3)設(shè)計(jì)電路注意的問題
◆SJA1000通過光耦與82C250的連接是光電隔離的接法。這樣可以防止線路間的串?dāng)_。在總線兩端要接2 個(gè)120歐姆的總線阻抗匹配電阻。忽略掉它們會(huì)降低總線的抗干擾能力,甚至導(dǎo)致無法通信。
◆SJA1000的TX1腳懸空,RX1引腳的電位必須維持在0.5vcc以上,否則將不能行成CAN協(xié)議所要求的電平邏輯。
◆光耦6N137的輸入端2,3腳的信號輸入極性要與光耦的輸出極性相同,如果電路設(shè)計(jì)時(shí)極性相反,也可以通過軟件編程改變SJA1000的數(shù)據(jù)輸出極性,從而使單片機(jī)的輸出數(shù)據(jù)與82C250中數(shù)據(jù)的極性一致。
4 在Small RTOS 下CAN節(jié)點(diǎn)的數(shù)據(jù)接收與發(fā)送實(shí)例
下面將通過一個(gè)簡單的實(shí)例(需要配置Small RTOS51操作系統(tǒng))來介紹在Small RTOS 下CAN節(jié)點(diǎn)的數(shù)據(jù)接收與發(fā)送過程。實(shí)例使用兩個(gè)CAN節(jié)點(diǎn)組成CAN網(wǎng)絡(luò),實(shí)現(xiàn)的功能是,每隔一定的定時(shí)周期發(fā)送一幀數(shù)據(jù),同時(shí)接收CAN數(shù)據(jù),并將接收的CAN數(shù)據(jù)發(fā)送到CAN總線上。LED將顯示收到的數(shù)據(jù)幀的頭兩個(gè)字節(jié)。
(1)實(shí)例部分代碼實(shí)現(xiàn)
void main(void)
{
CpuInit(); //微控制器初始化
UserTickTimer(void);//系統(tǒng)時(shí)鐘節(jié)拍的初始化
OSStart();//啟動(dòng)small rtos操作系統(tǒng)
SendData();//發(fā)送數(shù)據(jù)任務(wù)
{ unsigned char data status;
unsigned char i;
unsigned char xdata *p =CAN1_SJA_BaseAdr+REG_CAN_SR;
unsigned char xdata *p1;
status=SJAInit();//初始化can控制器
if(status!=0){
OSSendSignal(2); //喚醒錯(cuò)誤處理任務(wù)
}
P_SJAFrameStructApp=(P_SJAFrameStruct )BufCan2[0];
IT0 =0;//電平觸發(fā)模式
EX0=1;//使能CAN中斷
BufCan2[0]=0x88;
P_SJAFrameStructApp->FrameID=0x11111111;
while(1)
{
OSWait(K_TMO,2);//系統(tǒng)等待函數(shù),每兩個(gè)時(shí)鐘周期發(fā)送一次數(shù)據(jù)
P_SJAFrameStructApp->FrameID++;
p1=(unsigned char xdata *)P_SJAFrameStructApp->FrameID;
for(i=0;i4;i++)//發(fā)送測試數(shù)據(jù)
BufCan2[1+i] =*(p1+i);// 0x55;
for(i=0;i4;i++)
BufCan2[5+i] =*(p1+i);// 0x55;
for(i=0;i4;i++)
BufCan2[9+i] =*(p1+i);// 0x55;
status=SJASendData(BufCan2,0x10);//向CAN總線發(fā)送數(shù)據(jù),所發(fā)送數(shù)據(jù)的首地址是BufCan2
if(status!=0)//表示發(fā)送數(shù)據(jù)錯(cuò)誤
OSSendSignal(2);喚醒錯(cuò)誤處理任務(wù)
}
}
void DisPlay(void)
{
while(1){
OSWait(K_TMO,1);
ShowLED(); // led顯示處理
}
}
Error();// 錯(cuò)誤信息處理任務(wù)
}
(2) 測試結(jié)果:
如果運(yùn)行正確:數(shù)碼管會(huì)顯示依次加1的數(shù)值,否則:數(shù)碼管會(huì)顯示E-xx的錯(cuò)誤代碼
5 結(jié)束語
CAN自其誕生以來,以其獨(dú)特的設(shè)計(jì)思想、優(yōu)良的性能和極高的可靠性越來越受到工業(yè)界的青睞,CAN已經(jīng)廣泛用于汽車、火車、輪船、機(jī)器人、智能樓宇、機(jī)械制造、數(shù)控機(jī)床、紡織機(jī)械、醫(yī)療器械、農(nóng)用機(jī)械、液壓傳動(dòng)、消防管理、傳感器、自動(dòng)化儀表等領(lǐng)域。目前支持CAN協(xié)議的有Intel,Motorola,Philips,Siemens,NEC,Silioni,Honeywell等百余家國際著名大公司。因此CAN成為許多人學(xué)習(xí)的熱點(diǎn),本文對讀者了解CAN總線節(jié)點(diǎn)的設(shè)計(jì)以及CAN總線對數(shù)據(jù)的接收和發(fā)送原理有很大的幫助。
本文作者創(chuàng)新點(diǎn)是實(shí)現(xiàn)了在實(shí)時(shí)操作系統(tǒng)Small RTOS51下CAN總線上數(shù)據(jù)的接收與發(fā)送,用一個(gè)簡單的實(shí)例來說明了CAN總線的接收、發(fā)送原理。本文引用地址:http://www.104case.com/article/152298.htm









評論