嵌入式測控系統中數字濾波算法的實現

1.5加權平均濾波
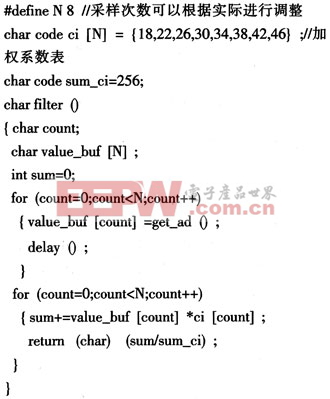
算術平均濾波和去極值平均濾波均存在平滑性和靈敏性的矛盾。因為,采樣次數太少,平滑效果差;采樣次數太多,靈敏度下降,對參數的變化趨勢不敏感。為協調兩者的關系,可采用加權平均濾波。即對連續N次采樣值分別乘上不同的加權系數之后再求累加和。加權系數一般先小后大,以突出后面若干采樣的效果,來加強系統對參數變化趨勢的辨識。各個加權系數均應是小于1的小數,且應滿足總和等于1的約束條件。這樣,加權運算之后的累加和即為有效采樣值。為方便計算,可取各加權系數均為整數,且總和為256,加權運算之后的累加和再除以256后便是有效采樣值。其參考程序如下:
1.6滑動平均濾波
以上介紹的各種平均濾波算法具有一個共同點,即每取得一個有效采樣值都必須連續進行若干次采樣,這些方法在采樣速度較慢(如雙積分型A/D轉換)或目標參數變化較快時,系統的實時性往往不能得到保證。而滑動平均濾波算法只采樣一次,它將這一次采樣值和過去的若干次采樣值一起求平均,然后所得到的有效采樣值即可投入使用。這樣,如果取N個采樣值求平均,則RAM中必須開辟N個數據的暫存區。每新采集一個數據便存入暫存區,同時去掉一個最老的數據,以保持這N個數據始終是最近的數據。這種數據存放方式可以用環形隊列數據結構來實現。其參考程序如下:

1.7低通濾波
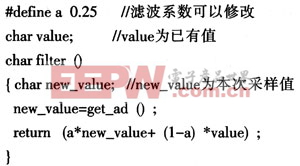
將普通硬件RC低通濾波器的微分方程用差分方程來表示,便可用軟件算法來模擬硬件濾波功能。經推導,對于低通濾波算法有:

式中Xn為本次采樣值;Yn-1為上次的濾波輸出值;α為濾波系數,其值1;Yn為本次濾波輸出值。這種算法對變化緩慢的物理量是很有效的。但應注意一點,它不能濾除高于二分之一采樣頻率的干擾信號。比如采樣頻率為2 Hz,則對1 Hz以上的干擾信號通常應配合硬件濾波電路來濾除。該方法的參考程序如下:
2各種數字濾波方法對比
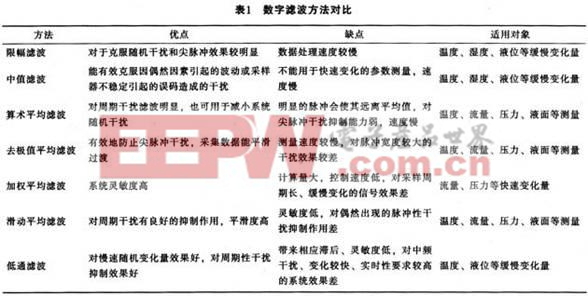
數字濾波的方法多種多樣,表1給出了幾種數字濾波算法的優缺點和適用對象。
3 結束語
基于嵌入式測控系統的數字濾波方法多種多樣,因此,在選擇濾波方法時,首先要考慮微控制器的存儲量、運算時間、運算能力以及實時性是否滿足實際要求。然后再根據主要的干擾源(對系統的測試精度影響最大的干擾源)和測試對象的特點來選擇合適的濾波方法。
linux操作系統文章專題:linux操作系統詳解(linux不再難懂) 電容式觸摸屏相關文章:電容式觸摸屏原理







評論