基于 CPLD EPM570T100C5的通用直流調速模塊設計

速度檢測子模塊在單位時間內對speedpulse計數,得到速度值speedvalue,并經過譯碼送到6位LED顯示。速度控制模塊根據設定速度和檢測速度用PID算法調節輸出脈沖,改變移相角來控制速度;設定速度為reg變量,可用inc和dec按鍵調節,也可以來自RS 485模塊;根據速度設定值的正負得出direction信號,控制脈沖信號加在兩組雙向可控硅之一,使電機正反兩方向轉動。主控子模塊負責控制整個系統的起動和停止,復位各個子模塊,提供1 Hz,25 600 Hz,10 Hz脈沖信號。RS 485模塊負責通信管理、解析通信協議,從而接收16位速度設定值。
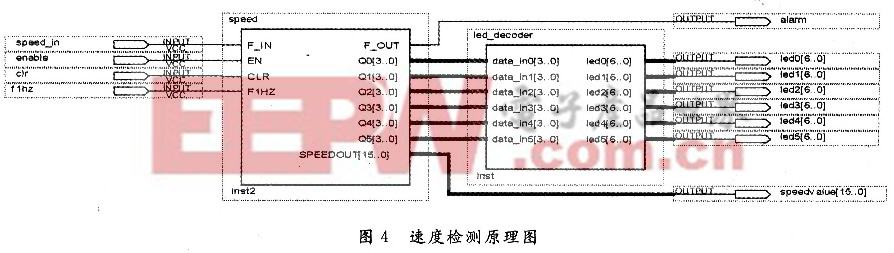
3.2 速度檢測
速度檢測模塊主要包括頻率計和譯碼電路,如圖4所示。enable為速度檢測使能信號,clr為輸出清零信號,speed_in為輸入速度脈沖信號,led0~led5為6位數碼管輸出信號。
3.3 速度控制
速度控制的原理是根據設定速度與實際速度的偏差用PID算法產生控制量,根據控制量的大小把過零檢測脈沖移相后加寬作為輸出控制信號,如圖5所示。

enable為輸入使能控制信號;f25600hz為決定移相單位時間的輸入信號;delay_flhz為按鍵加減的單位時間輸入信號;key_inc和key_ dec分別為加速和減速按鍵的輸入信號;zeroin為輸入同步過零脈沖信號,頻率為100Hz;outpulse為輸出的移相脈沖信號;direction為轉向信號。
3.4 RS 485通信模塊
RS 485總線是一種多點差分數據傳輸的電氣規范,其通信接口允許在簡單的一對雙絞線上進行多點雙向通信,具有噪聲抑制能力強,高速數據傳輸,且電纜比較長及可靠性高的特點。
RS 485子模塊主要實現UART功能,并通過notre和de信號控制發送和接收。串行通信固定設為9 600波特、8位數據、無奇偶校驗、1位停止位。數據格式:地址碼、數據、結束字符,其長度分別為8位、16位、8位。當總線上掛接多個調速模塊時,采用廣播方法發送消息,地址碼可根據實際情況約定。由于RS 485總線是異步半雙工的通信總線,一個時刻總線只可能呈現一種狀態。因此在空閑狀態時,將RS 485總線始終設置為接收狀態。3.5 仿真
功能仿真又稱前仿真,其目的是檢查HDL代碼所描述的邏輯功能是否和預期的功能一致。全部模塊已在QuartusⅡ中仿真通過,圖6給出速度控制模塊功能仿真波形。仿真時間為30 s,假設期間實際速度為常數,在3.9 s按下加速按鍵,使key_inc變為高電平,10 s后(13.90 s時刻)加速按鍵釋放變為低電平,據圖6的仿真波形圖中可知,在13.90 s時刻,輸出脈沖下降沿相對于過零脈沖從180°向前移相約70°,表明移相調速功能正常。












評論