DSP在衛(wèi)星測控多波束系統(tǒng)中的應(yīng)用

2.DSP模塊結(jié)構(gòu)
接收衛(wèi)星信號的陣列天線為6×6的面陣,多通道接收機完成信號的采樣,再經(jīng)過數(shù)字下變頻,送到處理單元的是36個通道的I、Q兩路共72路數(shù)據(jù)。由于陣列信號的數(shù)據(jù)量大,算法也比較復(fù)雜,我們需要使用2片TS101S芯片并行處理來實現(xiàn)。
并行系統(tǒng)的互連結(jié)構(gòu)包括2種方式:共享存儲器結(jié)構(gòu)和分布式結(jié)構(gòu)。共享存儲器結(jié)構(gòu)的連接方式是將所有的處理器都連到一個通道上,該通道一般是一種背板總線(如VXI總線),它既可以作為處理器間的通信媒介也可以作為處理器和共享存儲器間的數(shù)據(jù)通信。這種結(jié)構(gòu)數(shù)據(jù)傳輸?shù)膸掃h遠大于直接連接的通信端口,但是存在著總線競爭問題,隨著處理器數(shù)目的增加,處理器平均的總線帶寬會降低,影響數(shù)據(jù)吞吐量。分布式結(jié)構(gòu)處理器之間通過鏈路口進行直接的數(shù)據(jù)傳輸,鏈路口在處理器之間提供了高寬帶的點對點通信。這種連接完全為了處理器之間的通信,但是在數(shù)據(jù)傳輸時會占用其他DSP芯片的內(nèi)部資源。
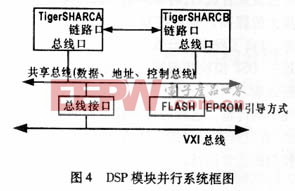
TigerSHARC DSP芯片硬件上可以同時支持這兩種并行體系結(jié)構(gòu),前者通過共享外部地址數(shù)據(jù)控制總線方式實現(xiàn),后者通過DSP間的專用的鏈路口點對點的互連實現(xiàn)。本文所設(shè)計的DSP模塊結(jié)構(gòu)從通信網(wǎng)絡(luò)的連接關(guān)系來看,既是共享總線系統(tǒng),又是分布式系統(tǒng),兩片DSP芯片的外部地址總線、數(shù)據(jù)總線、控制總線直接相連,并且一起通過總線接口連接到VXI總線上,實現(xiàn)和其他模塊的數(shù)據(jù)通信。由于每片DSP內(nèi)部有6 Mbit的雙口RAM,因此不需要外部數(shù)據(jù)存儲器。DSP A和DSP B的鏈路口也直接相連,兩片DSP可以通過鏈路口交換數(shù)據(jù)。DSP模塊程序采用EPROM方式引導(dǎo),兩片DSP共用一片548K×8bit的FLASH DSM2150作為程序存儲器。DSP模塊框圖如圖4所示。
整個DSP模塊的處理時間分為3個時間段,分別為從緩沖中讀取數(shù)據(jù)時間、測向時間和波束合成權(quán)值計算時間,其中主要的開銷是測向的時間。為了使DSP模塊具備更高的效率,必須根據(jù)該模塊的結(jié)構(gòu)和Tiger DSP芯片的性能合理分配任務(wù)。由于主要的開銷是測向算法,所以解決好測向的并行算法是尤其重要的。在MUSIC算法中,判斷出信號個數(shù)后要分別對各個信號區(qū)域進行峰值搜索,最后鎖定信號來向,系統(tǒng)最多可測4個不同來向的信號,因此將峰值搜索的區(qū)域劃分后交給兩片DSP同時進行搜索,可以節(jié)約大量的時間。測向和波束合成權(quán)值的計算不能同時進行,DSP A通知 DSP B進行波束合成后又可以返回去從緩存區(qū)中讀取數(shù)據(jù),此時DSP B計算波束合成的權(quán)值,這樣又大大提高了并行度。控制終端對DSP模塊的命令是通過外部中斷讀入,在執(zhí)行控制終端的命令時將定時器時鐘關(guān)閉。
DSP模塊的程序框架用C語言來構(gòu)建,在C中插入?yún)R編來提高運算效率,并充分利用TigerDSP芯片雙處理器核的SIMD結(jié)構(gòu),為了更好地對整個的程序進行優(yōu)化,使用開發(fā)軟件中的工具Linear profiling 分析各個子函數(shù)所占用的時間比例,從而優(yōu)化程序的瓶頸。并行的系統(tǒng)設(shè)計和一些優(yōu)化措施使DSP模塊的運行時間能夠滿足系統(tǒng)設(shè)計的需求。
3.DSP模塊設(shè)計的特點
在衛(wèi)星測控多波束系統(tǒng)DSP模塊的設(shè)計中我們考慮了多方面的因素,可以歸納為以下幾個特點:
首先,高性能TigerSHARC DSP并行結(jié)構(gòu)保證了系統(tǒng)的性能,系統(tǒng)要求在500 ms內(nèi)完成最多4個來波方向的測定和波束合成,使用兩片Tiger SHARC DSP并行工作,在300 ms內(nèi)就可以完成,使得系統(tǒng)有充裕的時間去響應(yīng)控制終端的命令。
其次,性能優(yōu)越的測向和波束合成算法保證了系統(tǒng)的穩(wěn)定工作,測向的精度保證在0.5°范圍內(nèi),信號經(jīng)過波束合成后,將噪聲信號加以抑制,信噪比有了很大的提高。并且在雙DSP處理器中并行分配任務(wù),提高了程序運行效率。
第三,DSP模塊和波束合成模塊之間以及和外部控制終端之間完備的通信協(xié)議保證了數(shù)據(jù)和命令能構(gòu)準確的傳輸。這種通信協(xié)議是根據(jù)實際需要自定義的,并且具有一定的容錯功能,保證了各個模塊之間接口的正常運行。
最后,系統(tǒng)控制流程設(shè)計合理,我們使用了DSP的外部中斷1、2、定時器中斷,以及兩片DSP之間通信的矢量中斷來實現(xiàn)對系統(tǒng)的控制,為了使高速運行的DSP能夠有效的與其他模塊、外部控制終端進行通信,程序流程的設(shè)計經(jīng)過了仔細的推敲,為DSP的穩(wěn)定工作提供保障。
五、結(jié)束語
本文討論了衛(wèi)星測控多波束系統(tǒng)DSP模塊中算法的并行實現(xiàn)以及并行處理任務(wù)的分配,采取了一系列措施優(yōu)化DSP模塊的整體程序,并應(yīng)用了模塊化的思想,結(jié)構(gòu)設(shè)計合理,能夠滿足系統(tǒng)的需求。











評論