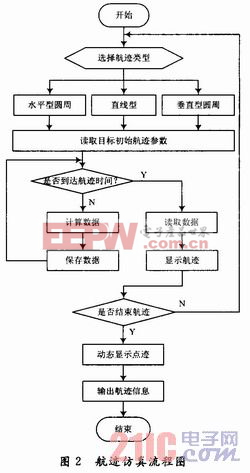
基于嵌入式系統的典型雷達航跡仿真與實現 作者: 時間:2010-12-24 來源:網絡 加入技術交流群 掃碼加入和技術大咖面對面交流海量資料庫查詢 收藏 <a target='_blank'><img src='https://ad.eepw.com.cn/www/delivery/avw.php?zoneid=88&cb=INSERT_RANDOM_NUMBER_HERE&n=a635e61e' border='0' alt='' /></a> <a target='_blank'><img src='https://ad.eepw.com.cn/www/delivery/avw.php?zoneid=87&cb=INSERT_RANDOM_NUMBER_HERE&n=a576c0a2' border='0' alt='' /></a> 1.3 目標飛行的雷達坐標 在雷達應用中,測定目標坐標常用極(球)坐標系統,空間任一目標的位置可用斜距D,方位角β,高低角θ來表示。在1.2節中為了簡化,算出的都是單位時間增量△t內的坐標增量,但是在實際運算中,應該使用實時坐標值。假設目標在直角坐標系中的位置為(xt,yt,zt),則有: 2 仿真流程 航跡仿真流程如圖2所示。 上一頁 1 2 3 4 下一頁






評論