基于的毫米波天線自動對準平臺系統設計

摘要:在毫米波中繼通信設備中,為提高對準精度,縮短對準時間,滿足快速反應的要求,并結合毫米波波辯窄,方向性強的特點,創造性地提出了毫米波天線自動對準平臺系統的設計方案。在天線對準過程中,將復雜的的空間搜索轉換成兩個簡單的水平和垂直搜索,簡化了搜索控制算法。采用基于ARM的32位微處理器LPC2294進行控制,用步進電機驅動平臺和毫米波設備轉動,實現毫米波通信設備的快速準確對準。毫米波中繼通信設備在國內還處于研發改進階段,所以該對準平臺系統具有極大的參考意義。
關鍵詞:毫米波天線;ARM;μC/OS-Ⅱ;嵌入式RISC處理器;自動對準平臺
毫米波作為一項尖端學科在中繼通信方面發揮著越來越重要的作用。但毫米波波瓣窄,方向性強,導致天線對準困難,存在對通時間長,甚至難以對準的問題,不能滿足快速反應的要求。因此,需要一種高效的毫米波天線自動對準裝置來提高天線架裝與對準速度,縮短天線架裝與對準時間,以適應快速準確通信的需要。本文從多任務處理和可靠性等角度出發,提出了一種基于ARM7的32位微處理器LPC2294和實時多任務操作系統μC/OS-Ⅱ步進電機控制平臺的方法,將毫米波通信設備架裝在平臺系統上,從而使毫米波通信設備通過平臺的轉動快速對準。
1 系統工作原理
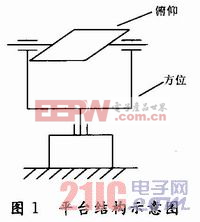
在隨機狀態下,通信設備中兩個天線的軸線一般位于不同的平面內,故天線對準實際上是一個較復雜的空間搜索問題。從天線軸線在兩正交平面(方位平面和俯仰平面)內的投影可以看出,只要分別在方位面和俯仰面內調整即可將兩天線對準。這種調整方式將空間搜索轉換成兩個簡單的水平和垂直面搜索,可以簡化搜索控制算法。天線對準時,兩天線的方位指向誤差較大,而俯仰指向誤差不會太大。故可先實現方位對準,然后調整俯仰指向,實現兩個天線的完全對準。基于上述特點,將天線安裝在內框的俯仰平面上,如圖1所示。實際使用時,通信設備通過平臺架裝在天線升降器上,最高可以距地面10 m,并可以根據需要升降。采用單軸步進式跟蹤方案,俯仰方向和水平方向的轉動共用一個電機,通過繼電器進行切換。根據平臺的轉動規律,在ARM控制器中,編程實現間歇式發送脈沖,由電機驅動器放大脈沖,從而驅動步進電機,最后由機械裝置轉動平臺以及與其相連的通信設備,完成對毫米波通信設備間方向的搜索與對準。
2 系統硬件構成
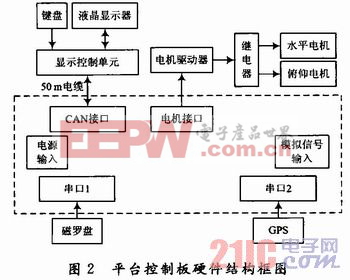
該平臺對準系統主要由平臺控制板、電機驅動器、步進電機、機械傳動裝置和相關傳感器(羅盤和GPS)等組成。圖2給出了步進電動機的片外連接硬件結構框圖。本文重點介紹其核心——ARM控制部分。
2.1 ARM處理器簡介
ARM的32位體系結構被公認為業界領先的32位嵌入式RISC處理器結構。LPC2294是飛利浦公司生產的32位ARM7TDMI-S微處理器,具有低功耗、低價格、高性能的特點。







評論