基于SEP3203拉力試驗機嵌入式測控系統設計

2 測控系統硬件設計
根據試驗機的功能要求和工作原理,該系統硬件體系結構如圖2所示。
2.1 核心板和電源模塊
核心板上的處理器采用東南大學博芯公司的SEP3203。SEP3203處理器內嵌了英國ARM公司提供的ARM7TDMI處理器內核,內嵌20 KB片上零等待靜態存儲器;集成了支持黑白、灰度、彩色的LCD控制器;支持用于連接觸摸屏通信的SPI協議。一個通道實時時鐘模塊,85個通用I/O口和18個外部中斷源。
核心板中存儲器部分包括8 MB SDRAM和2 MBNOR FLASH。通過擴展插座引入核心板所用到的RESET和WAKEUP功能引腳;通過擴展插座將22位地址線和32位數據線以及未用的控制信號擴展到母板。
該系統要求多路電源供電,如ARM核心板需要3.3 V和5 V兩路電源;在系統的外圍部件中,LCD控制模塊需要5 V電源供電;A/D轉換模塊需要6 V電源同時供電;伺服驅動器則需要12 V電源供電,所以應該對輸入電源進行相應的穩壓、分路等設計。
2.2 外圍通用接口模塊
試驗機控制器的外圍通用接口模塊主要包含通用I/O口、USB接口、JTAG調試口等。在試驗機系統中,控制器除了要與上下層通信外,主要還涉及到傳感器測量參數的數據采集和伺服控制信號的輸出等。同時,開關量也是測控現場最簡單且使用較頻繁的信號之一,如試驗機動橫梁的限位開關、液晶顯示控制和指示燈的亮滅等。設計中采用SEP3203的通用I/口來實現這些信號的輸入/輸出。
SEP3203提供了85個通用I/O口和18個外部中斷源,無需擴展I/O口。使用端口功能時首先在程序里把引腳功能模式定義好,即將每個端口配置為輸入模式、輸出模式或中斷功能模式,每個復用引腳都有對應的寄存器位來選擇實際使用的功能模式。該設計中,I/O通道使用雙向緩沖器件74LVCH162245A,以增強總線驅動能力。
此外,系統中還添加了2個USB接口,用于測試結果的輸出或作為備用接口。
2.3 信號采集模塊
信號采集模塊包括多通道力值采集模塊和多通道變形信號采集模塊。
力值和變形是系統所采集的最主要信號。傳感器的電壓信號輸入到模/數轉換器CS5530中,CS5530的差動輸入端可以直接測量來自傳感器的毫伏信號,這簡化了與外圍電路的連接。可編程增益放大器能使放大倍數從1~32進行設定,大大提高了系統的動態特性。多級程控數字濾波器可使數據輸出速率得到選擇,范圍為7.5 Hz~3.84 kHz,方便了與外設的連接。另外,CS5530內部有一個完整的自校正系統,可以進行自校準和系統校準,從而可消除A/D本身的零點增益和漂移誤差,以及系統通道的失調和增益誤差。此外,由線性穩壓元件7806提供工作電壓,以確保信號采集精度。
2.4 人機交互模塊
為了使萬能試驗機測控系統具有更好的人機交互界面,便于用戶調試與操作,需要給其配置顯示裝置,如LCD液晶顯示屏以及信號燈提示等。另外.要進行人機交互,還得有輸入裝置,使用戶可以對ARM主控制器發出命令或輸入必要的控制參數等,該系統采用觸摸屏輸入。
根據系統的實際需要,液晶顯示模塊采用240×320黑白4級灰度顯示屏,兼容彩色7寸64K彩色TFT液晶屏,觸摸屏與LCD合為一體。觸摸屏采用AC97+UCB1400工作方式。UCB1400的小體積與低電壓(3.3 V)特性使其成為新一代PDA應用產品的理想選擇。它集成了先進的音頻編解碼、觸摸屏控制器以及電源管理等功能,并以標準、立即可用的產品形態提供客戶化功能。UCB1400控制器作為液晶顯示屏與ARM的接口,用來直接驅動液晶控制字符、漢字以及圖形的顯示。借助UCB1400,可以直接利用SEP3203的I/O口模擬液晶的讀/寫和控制時序,使得ARM對液晶的操作實際上變為ARM對液晶顯示控制器UCB1400的操作,從而簡化了接口電路的硬件連接和軟件編程。
3 測控系統軟件設計
μC/OS-Ⅱ是為嵌入式應用而設計的完全可剝離的實時操作系統,可以管理64個任務,其中留給用戶的應用程序最多可有56個任務。這種RTOS應用軟件的開發過程為:
(1)根據系統設計方案,明確應用軟件的功能;
(2)結合RTOS的并發特性(或準并發特性),對應用軟件要實現的功能進行大小適當的劃分,也就是把應用軟件的功能按照一定的原則劃分為若干個任務模塊;
(3)對各個任務間的通信和時延進行仔細的確認。
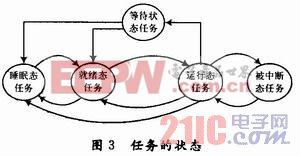
在μC/OS-Ⅱ中,每個任務都是一個無限的循環,都可能處于以下5種狀態:休眠態、就緒態、運行態、掛起態和被中斷態。任務狀態之間的轉換如圖3所示。本文引用地址:http://www.104case.com/article/150912.htm







評論