MC9S12DG128的路徑識別的智能車系統(tǒng)設(shè)計

1.4 車速檢測模塊
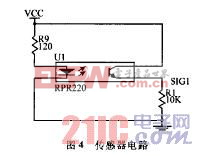
車速檢測模塊采用韓國Autonics公司的E30S-360-3-2型旋轉(zhuǎn)編碼器作為車速檢測器件。該旋轉(zhuǎn)編碼器硬件電路簡單、信號采集速度快,360線的精度足以滿足PI控制算法調(diào)節(jié)的需要。旋轉(zhuǎn)編碼器與直流驅(qū)動電機通過齒數(shù)為1:1的兩齒輪連接在一起,所以智能車車輪轉(zhuǎn)動一圈即可以用360個脈沖表示。因此一定時間內(nèi)單片機累加器獲得的脈沖數(shù)值可以用來表示車速,并可直接作為控制器參數(shù)。圖4為車速檢測模塊硬件電路圖。
1.5 舵機控制模塊
本系統(tǒng)使用SANWA SRM102型舵機完成智能車轉(zhuǎn)向。舵機屬于位置伺服電機,控制信號是MC9S12DG128單片機產(chǎn)生的PWM信號。舵機自身硬件特性決定:在給定電壓一定時,空載和帶載時的角速度ω分別保持恒值,而線速度υ=ω?R,正比于轉(zhuǎn)臂的長度R。當(dāng)舵機所需轉(zhuǎn)動幅度一定時,長轉(zhuǎn)臂要比短轉(zhuǎn)臂轉(zhuǎn)動的角度小,即響應(yīng)更快。如圖5所示,對于轉(zhuǎn)臂1和2,當(dāng)R1R2且轉(zhuǎn)動相同的位移時,轉(zhuǎn)角θ1>θ2。因此對于相同的角速度ω,可得轉(zhuǎn)臂響應(yīng)時間t1>t2。顯然利用舵機的轉(zhuǎn)距余量可以提高系統(tǒng)整體的響應(yīng)速度[4]。
智能車在行駛過程中,舵機的響應(yīng)時間決定著系統(tǒng)的穩(wěn)定性及快速性。為了減小舵機的時滯現(xiàn)象,充分利用舵機的轉(zhuǎn)矩余量,本系統(tǒng)采用了以下三種方法:
(1) 提高舵機工作電壓,使其工作在額定電壓之上,從而減小舵機的響應(yīng)時間;
(2) 將舵機轉(zhuǎn)臂加長至3.5cm,充分利用轉(zhuǎn)矩余量;
(3) 將兩個8位PWM寄存器合并為一個16位PWM寄存器,將舵機的PWM控制周期放大至2000,從而細化PWM控制量,使轉(zhuǎn)臂變化更加靈活、均勻。







評論