狀態(tài)機(jī)在嵌入式系統(tǒng)中的應(yīng)用

對(duì)所有需要發(fā)送到GSM
Modem的數(shù)據(jù),則通過(guò)UART1發(fā)送緩沖區(qū)來(lái)完成。具體發(fā)送哪些數(shù)據(jù)(讀取/刪除短信、下行功率查詢、信源信息查詢、未讀短信查詢)或者緩沖區(qū)的數(shù)據(jù)(短消息發(fā)送緩沖區(qū)、告警上報(bào)發(fā)送緩沖區(qū))由軟件根據(jù)相應(yīng)的狀態(tài)來(lái)選擇確定。
3 設(shè)計(jì)思路的實(shí)現(xiàn)
3.1 串口1數(shù)據(jù)的發(fā)送
3.1.1 串口1發(fā)送緩沖區(qū)的數(shù)據(jù)結(jié)構(gòu)
串口1是否有數(shù)據(jù)需要發(fā)送,由串口1的發(fā)送緩沖區(qū)的狀態(tài)來(lái)決定。串口1發(fā)送緩沖區(qū)的數(shù)據(jù)結(jié)構(gòu)定義如下:
typedef struct{
unsigned char bStBuf;//bStBuf =
Uart1_TxBuf_Rdy或者=Uart1_TxBuf_Wait或者=Uart1_TxBuf_Empty
unsigned short Index;
unsigned short Len;
char Buf[270];
}Uart1Buf_t;
① bStBuf成員: 串口1發(fā)送緩沖區(qū)的狀態(tài)。
② Index成員: 串口1發(fā)送數(shù)據(jù)緩沖區(qū)索引。
③ Len成員: 串口1發(fā)送數(shù)據(jù)緩沖區(qū)中有效數(shù)據(jù)的長(zhǎng)度。
④ Buf成員: 串口1發(fā)送數(shù)據(jù)緩沖區(qū)。
3.1.2 串口1發(fā)送緩沖區(qū)軟件定時(shí)器
由于GSM Modem的特性致使串口1不能不間斷地發(fā)送數(shù)據(jù),因此,對(duì)串口1的數(shù)據(jù)發(fā)送設(shè)定一個(gè)軟件定時(shí)器。軟件定時(shí)器用于控制GSM
Modem是否可以接收來(lái)自串口1的新數(shù)據(jù)。軟件定時(shí)器的結(jié)構(gòu)定義如下:
typedef struct{
unsigned char bTimerSt;//軟件定時(shí)器的狀態(tài): Timer_START或Timer_STOP
unsigned int TimerCtn;//軟件定時(shí)器的計(jì)數(shù)器
void (*func)(void);//超時(shí)后相應(yīng)的處理功能函數(shù)指針
}SoftTimer_t;
① bTimerSt成員: 用于描述軟件定時(shí)器的狀態(tài)。它有2種狀態(tài):
◆ Timer_START——開(kāi)始軟件定時(shí)器;
◆ Timer_STOP——停止軟件定時(shí)器。
② TimerCtn成員: 用于描述軟件定時(shí)器的定時(shí)時(shí)間。它是一個(gè)32位的計(jì)數(shù)器,硬件定時(shí)的基準(zhǔn)時(shí)間為20
ms(建議設(shè)置在前后臺(tái)系統(tǒng)主程序循環(huán)1次需要的時(shí)間),因此最大定時(shí)時(shí)間為20 ms×232=85 899 345.92 s。
③ func成員:
用于描述軟件定時(shí)器超時(shí)需要去處理相應(yīng)事情的函數(shù)。該函數(shù)是在定時(shí)器中斷服務(wù)程序下運(yùn)行的,因此為了減少中斷服務(wù)程序占用CPU的時(shí)間,函數(shù)只作簡(jiǎn)單的狀態(tài)設(shè)置或者清除工作,如函數(shù)Clear_Uart1TxbStBuf。
void Clear_Uart1TxbStBuf(void){
Uart1Tx.bStBuf = Uart1_TxBuf_Empty;//設(shè)置串口1發(fā)送緩沖區(qū)為空
……
}
3.1.3 串口1數(shù)據(jù)發(fā)送狀態(tài)機(jī)
串口1發(fā)送緩沖區(qū)的成員bStBuf有3種狀態(tài)。
① Uart1_TxBuf_Rdy: 串口1發(fā)送緩沖區(qū)數(shù)據(jù)準(zhǔn)備好。
② Uart1_TxBuf_Wait: 串口1發(fā)送緩沖區(qū)數(shù)據(jù)等待。
③ Uart1_TxBuf_Empty: 串口1發(fā)送緩沖區(qū)空。
3種狀態(tài)的轉(zhuǎn)移情況如圖3所示。
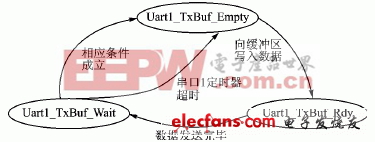
圖3 串口1的發(fā)送緩沖區(qū)狀態(tài)機(jī)
當(dāng)串口1發(fā)送緩沖區(qū)在Uart1_TxBuf_Rdy狀態(tài)下時(shí),軟件可以向串口的發(fā)送緩沖區(qū)中寫入數(shù)據(jù)。寫入數(shù)據(jù)后,串口1發(fā)送緩沖區(qū)的狀態(tài)將轉(zhuǎn)移到Uart1_TxBuf_Rdy。
在將需要發(fā)送的數(shù)據(jù)拷貝到串口1發(fā)送緩沖區(qū)后,開(kāi)啟串口1的發(fā)送中斷,軟件將進(jìn)入串口1的發(fā)送中斷服務(wù)程序。這個(gè)中斷服務(wù)程序?qū)z測(cè)串口1發(fā)送緩沖區(qū)的狀態(tài)。如果狀態(tài)為Uart1_TxBuf_Rdy,則說(shuō)明串口1發(fā)送緩沖區(qū)中有數(shù)據(jù)需要發(fā)送,這時(shí)串口1緩沖區(qū)的數(shù)據(jù)通過(guò)串口1的發(fā)送中斷把所有的數(shù)據(jù)發(fā)送給GSM
Modem。當(dāng)數(shù)據(jù)發(fā)送完畢后,串口1發(fā)送緩沖區(qū)的狀態(tài)將轉(zhuǎn)移到Uart1_TxBuf_Wait狀態(tài),否則,將維持當(dāng)前的狀態(tài)。
當(dāng)串口1發(fā)送緩沖區(qū)的狀態(tài)在Uart1_TxBuf_Wait狀態(tài)時(shí),它可以有兩條路徑讓串口1發(fā)送緩沖區(qū)的狀態(tài)轉(zhuǎn)移到Uart1_TxBuf_Empty:
其一是串口1軟件定時(shí)器超時(shí)。
其二是相應(yīng)的條件成立。如發(fā)送端消息,當(dāng)軟件從串口1的接收緩沖區(qū)中解析出“+CMGSn(1≤n≤255)”信息或者發(fā)送失敗的信息時(shí),串口1發(fā)送緩沖區(qū)的狀態(tài)將轉(zhuǎn)移到Uart1_TxBuf_Empty狀態(tài),同時(shí)停止串口1軟件定時(shí)器;讀短消息收到“+CMGR……”信息。
linux操作系統(tǒng)文章專題:linux操作系統(tǒng)詳解(linux不再難懂)







評(píng)論