移動嵌入ARM7串口9位方式編程技術(shù)

1 主從式多機通信
本文引用地址:http://www.104case.com/article/150590.htm 所謂主從式多機系統(tǒng),即在數(shù)個arm(或單片機)中,有一個是主機,其余的為從機。從機要服從主機的調(diào)度、支配,其拓撲結(jié)構(gòu)如圖1所示。
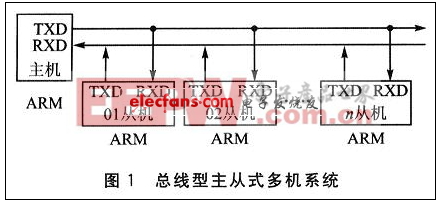
主機信息可以發(fā)到各個從機,從機發(fā)送的信息只能被主機接收,從機之間不進行通信。
51單片機串口不同尋常的特征是包括第9位方式(在串口模式2和模式3下)。它允許把在串行口通信增加的第9位用于標(biāo)志特殊字節(jié)的接收。一般約定第9位為高時表示該字節(jié)為地址字節(jié),第9位為低時為數(shù)據(jù)字節(jié)。第9位方式允許接收單片機信息,僅當(dāng)字節(jié)具有一個第9位時才能被中斷。用這種方式,主機首先廣播1字節(jié),并讓其第9位為高,同時收到該字節(jié)的各個從機,只有地址相符的打開,以接收后面的數(shù)據(jù)字節(jié)。所接續(xù)的數(shù)據(jù)字節(jié)(第9位為低)不能引起其他從機中斷,因為未送它們的地址。
51單片機用9位方式多機通信時,串口模式必須在方式2或方式3。
其實現(xiàn)多機通信的原理和工作過程如下:作主機的8051的SM2應(yīng)設(shè)定為O,作從機的sM2設(shè)定為1。主機發(fā)送并被從機接收的信息有兩類:一類是地址,用于指示需要和主機通信的從機地址,由串行數(shù)據(jù)第9位為“1”來標(biāo)志;另一類是數(shù)據(jù),由串行數(shù)據(jù)第9位為“0”來標(biāo)志。由于所有從機的SM2=1,故每個從機總能在R1=O收到主機發(fā)來的地址(因為串行數(shù)據(jù)的第9位為“l”),并進入各自的中斷服務(wù)程序。在中斷服務(wù)程序中,每臺從機把接收到的從機地址和它的本機地址(系統(tǒng)設(shè)計時所分配)進行比較。所有比較不相等的從機均從各自的中斷服務(wù)程序中退出(SM2仍為1),只有比較成功的從機才足被主機尋址通信的從機。被尋址的從機在程序中使SM2=0,以便接收隨之而來的數(shù)據(jù)或命令(RB8=0)。上述過程進一步歸結(jié)如下:
①主機的SM2為O,所有從機的SM2=1,以便接收主機發(fā)來的地址。
②主機給從機發(fā)送地址時,第9數(shù)據(jù)位應(yīng)設(shè)置l,以指示從機接收這個地址。
③所有從機在SM2=1、RB8=1和RI=O時,接收主機發(fā)來的從機地址,進入相應(yīng)中斷服務(wù)程序,并與本機地址相比較,以便確認(rèn)是否為被尋址從機。
④被尋址從機通過指令清除SM2,以便正常接收數(shù)據(jù),并向主機發(fā)回接收到的從機地址,供主機核對。未被尋址的從機保持SM2=1,并退出各自中斷服務(wù)程序。
⑤完成主機和被尋址之間的數(shù)據(jù)通信,被尋址從機在通信完成后重新使SM2=l,并退出中斷服務(wù)程序,等待下次通信。
從以上8051實現(xiàn)9位方式多機通信的過程可見,關(guān)鍵問題在于:
①發(fā)送端(主機)如何發(fā)送第9位,并且可編程設(shè)置1或O;
②接收端(從機)如何接收到這第9位,并判斷出是l還是0。
以上問題,8051串口可通過控制寄存器SCON中的TB8、RB8和SM2位的設(shè)置和讀取輕松解決,但在ARM中并沒有與805l類似功能的寄存器。那么ARM7多機系統(tǒng)怎樣實現(xiàn)如上9位方式多機通信呢?下面通過分析arm串口(以UART0為例)的內(nèi)部結(jié)構(gòu)和相關(guān)寄存器,給出一個有效的解決方案。




評論