嵌入式多參數(shù)監(jiān)護儀設計

1 引 言
本文引用地址:http://www.104case.com/article/150426.htm本文介紹一種基于ARM的實時監(jiān)護系統(tǒng),它將32位RISC結(jié)構(gòu)的ARM內(nèi)核處理器與實時多任務嵌入式系統(tǒng)相結(jié)合,并通過嵌入式TCP/IP協(xié)議棧為平臺添加網(wǎng)絡傳輸功能,構(gòu)建一個新型的多參數(shù)監(jiān)護儀系統(tǒng)。將嵌入式系統(tǒng),網(wǎng)絡等技術(shù)應用于醫(yī)用監(jiān)護儀領(lǐng)域,能使多參數(shù)監(jiān)護儀順應現(xiàn)代醫(yī)用監(jiān)護儀市場縮小體積,提高數(shù)據(jù)處理能力,遠程醫(yī)療等方面的要求。
2 系統(tǒng)硬件設計
醫(yī)用監(jiān)護儀具有以下幾個方面功能:測量功能、分析功能、報警功能、打印功能、網(wǎng)絡通信功能等。六參數(shù)模塊通過導聯(lián)端、光手指、袖帶獲得人體的心電、無創(chuàng)血壓、血氧、脈率、呼吸、體溫六參數(shù)信號,通過串口通信方式與以ARM7為內(nèi)核的嵌入式處理器相連,數(shù)據(jù)從串口送到ARM7中 央處理器,通過多任務調(diào)度,進行實時數(shù)據(jù)處理,并在LCD上實時顯示各種信號的圖形和數(shù)值,還可以由外部鍵盤控制,進行存儲和網(wǎng)絡發(fā)送,并對各種檢測信號設置報警線,對超出報警范圍的檢測情況進行報警。硬件結(jié)構(gòu)圖1所示。
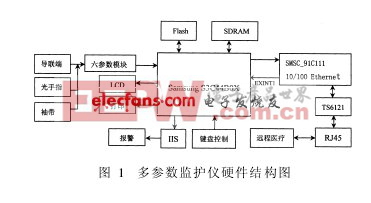
圖1 多參數(shù)監(jiān)護儀硬件結(jié)構(gòu)圖
3 開發(fā)系統(tǒng)軟件設計
3.1 軟件開發(fā)總體介紹
利用PC機運行的Hitool forARM開發(fā)環(huán)境下調(diào)試程序:首先運行系統(tǒng)、Memory及I/O端口的初始化程序,隨后進入主程序,采用外部中斷方式,判斷是否有鍵輸入,若有則調(diào)用鍵盤控制子程序進行識別所按下的鍵,根據(jù)鍵盤的控制執(zhí)行相應的任務;若無就調(diào)用串口讀入程序,采集心電、血氧、血壓等數(shù)據(jù),并判別所采集數(shù)據(jù)的類型,存入不同地址的SDRAM中,并依次分類進行處理,處理完畢,判斷是否超越各自的報警限,若是則調(diào)用報警程序和顯示程序,若否則直接調(diào)用顯示程序;這樣,各種數(shù)據(jù)就實時地采集進來,并在LCD上顯示測試數(shù)值和心電、呼吸波形。其中測試數(shù)值按每分鐘存儲,心電、呼吸波形按鍵存儲,按翻頁鍵可以調(diào)出相應的存儲波形并進行顯示;根據(jù)打印和網(wǎng)絡命令進行打印和網(wǎng)絡命令處理等。程序主要用C語言編寫。
3.2 串口的處理
硬件接口采用標準RS-232C異步串行接口,選用發(fā)送 (TXD)、接收(RXD)和地線的三線方式,其它的握手信號直接懸空。要實現(xiàn)六參數(shù)模塊與S3C44BO之間的串口通信,必須使兩者采用相同的數(shù)據(jù)傳輸方式,它們通信的數(shù)據(jù)格式如下;波特率為9600bps, 8位數(shù)據(jù)位, 1位停止位,無奇偶校驗位。
另外,在I/O端口初始化程序中,定義Uart_Init函數(shù),對串行口各寄存器進行初始化,配置參數(shù)時鐘和波特率等。在設計中主要進行以下串行口寄存器設置:
UART線性控制寄存器ULCON1=0x3;
UART控制寄存器UCON1=0x245;
UART先進先出控制寄存器UFCON1=0x1;
UART波特率寄存器UBRDTV,根據(jù)公式計算出。
在串口讀入程序中,采用了中斷方式,來實現(xiàn)雙向數(shù)據(jù)傳輸,達到實時控制的目的。串口程序數(shù)據(jù)接收過程為:調(diào)用Uart_Getch()函數(shù)讀入N個字符,以數(shù)組的方式放置在SDRAM中,然后進行數(shù)據(jù)處理。在lib.C程序中部分源代碼如下:
charUart_Getch()
{…
while(! (rUTRSTAT1 0x1)); //Receive data ready
return rURXH1;
…}
3. 3 LCD顯示
當有新數(shù)據(jù)需要顯示時, LCD顯示模塊將新的采樣數(shù)據(jù)寫入LCD顯示存儲器中, S3C44BO芯片所支持的LCD控制器在不需要CPU介入的情況下,通過專用DMA自動地將需要顯示的數(shù)據(jù)從顯示存儲器傳送到LCD顯示器中。LCD顯示器不斷地接收數(shù)據(jù),就在LCD上顯示監(jiān)測內(nèi)容。
3. 3. 1 LCD初始化
定義Lcd_MonoInit()函數(shù),在LCD的三個控制寄存器中,設置LCD掃描寬度等與硬件時序有關(guān)的量:如:使用160×240的黑白單色顯示屏, 4-bit單掃描等。在LCD的三個緩沖初始地址寄存器中,主要配置了幀緩沖寄存器BUFFER的起始地址等。
以上各寄存器基本的配置的源程序如下:
void Lcd_MonoInit(void) //初始化LCD屏幕
{ //160×240 1bit/1pixelLCD
#defineMVAL_USED 0
rLCDCON1=(0) (15) (MVAL_USED7) (0x3
8) (0x310) (CLKVAL_MONO12);
//disable, 4B_SNGL_SCAN,WDLY=8clk,WLH=8clk
rLCDCON2=(LINEVAL) (HOZVAL10) (1021);
//LINEBLANK=10(without any calculation)
rLCDSADDR1= (0x027) (((U32) frameBuffer1>>22)
21 ) M5D((U32)frameBuffer1>>1);
//monochrome,LCDBANK,LCDBASEU
rLCDSADDR2=M5D( (((U32)frameBuffer1+(SCR_XSIZE*LCD_
YSIZE/8))>>1)) (MVAL21) (129)
;
rLCDSADDR3=(LCD_XSIZE/16) ((SCR_XSIZE-LCD_XSIZE) /
16)9);
}
3. 3. 2 打開LCD
1)在內(nèi)核中開辟內(nèi)存空間用于顯示內(nèi)存
可在顯示模塊中加入:#define frameBuffer1 0xC400000
2)定義幀緩沖器長度,并對其賦初值設置一個行列與LCD
高寬相對應的數(shù)組pbuffer, pbuffer用于存放發(fā)送至顯示屏的每幀像點數(shù)據(jù),像點數(shù)據(jù)的多少取決于顯示屏的大小; pbuffer=BitsPerPixe*l Lines* /8=160* 240/8=4800(字節(jié))。
由于pbuffer被定義為U32,即32位(八個四位)指針,每一個元素對應LCD顯示屏上的一個像素點,顯示方式采用4-bit單掃描,所以應當循環(huán)4800(字節(jié)) /4=1200次,實際上對應的單元數(shù)為整個160×240的屏幕范圍。
for( i=0, i1200; i++)
#(pBuffer[ i])=0x0;
3)數(shù)據(jù)處理
LCD的數(shù)據(jù)處理主要對要顯示的數(shù)據(jù)進行處理(4bit到32bit的轉(zhuǎn)換)。
temp_data=(Buf[ i* 4+3]24)+(Buf[ i* 4+2] 16)+(Buf[*i 4+1]8)+(Buf[*i 4]);
linux操作系統(tǒng)文章專題:linux操作系統(tǒng)詳解(linux不再難懂)





評論