一種實(shí)時(shí)圖像目標(biāo)搜索與跟蹤系統(tǒng)設(shè)計(jì)
 加入技術(shù)交流群
加入技術(shù)交流群

掃碼加入
和技術(shù)大咖面對(duì)面交流
海量資料庫(kù)查詢(xún)
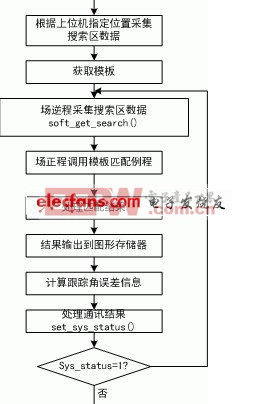
圖2 相關(guān)匹配流程圖
一場(chǎng)數(shù)據(jù)處理完成后結(jié)果一路經(jīng)串口反饋到上位機(jī)上,一路經(jīng)圖形存儲(chǔ)器把在目標(biāo)位置處畫(huà)出窗口并顯示到監(jiān)視器上。然后開(kāi)始進(jìn)行下一場(chǎng)處理。
從DSP完成實(shí)時(shí)高斯噪聲的生產(chǎn),噪聲疊加到采集的輸入圖像上可以用以用來(lái)檢驗(yàn)不同的跟蹤算法在不同強(qiáng)度的高斯噪聲下的實(shí)際效果。
算法為由均勻噪聲通過(guò)映射表生成高斯隨機(jī)噪聲,具有高速、高精度的優(yōu)點(diǎn)。原理框圖如圖3所示:左半部分為均勻噪聲生成部分,采用模數(shù)取余法,依靠已有的k個(gè)在(-x,x)內(nèi)均勻分布,互相獨(dú)立的隨機(jī)數(shù)種子x(1),…..x(k),不斷的生成新的隨機(jī)數(shù),并將之向外輸出。右半部分采用左部分的輸出值為偏移地址,加上右表的基地址生成映射表地址,將查表后得到的該地址結(jié)果輸出就得到了所要求的結(jié)果高斯噪聲值,然后進(jìn)入下一個(gè)循環(huán)。
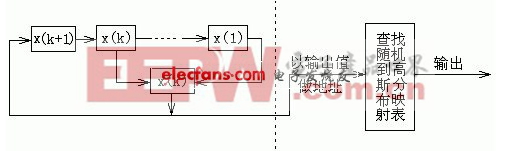
圖3 噪聲產(chǎn)生原理圖
從DSP主要完成噪聲的產(chǎn)生工作,如果系統(tǒng)不需要模擬高斯噪聲,此DSP也可根據(jù)實(shí)際需要用作別的用途,增加了系統(tǒng)的可擴(kuò)展性。
4.結(jié)束語(yǔ)
本系統(tǒng)在硬件上采用了DSP、CPLD等集成度高、功耗低的先進(jìn)器件,使得系統(tǒng)電路具備體積小、重量輕、功耗低、可靠性高等優(yōu)點(diǎn),是一種優(yōu)良的圖像處理平臺(tái)。




評(píng)論