一種嵌入式運動控制器的實現

軟件設計采用模塊化設計方法,程序的總體結構采用以數據管理和位置速度控制為主,以I/O端口控制、邏輯控制、插補運算等為中斷任務或子函數任務的形式。位置速度控制主要負責對實時運動狀態的監控與調節;I/O端口控制主要負責掃描輸入端口、設置輸出端口等輔助性任務。
DSP控制程序主要由一個定時中斷構成,主程序啟動后,首先完成對TMS320F2812的初始化及系統的一些基本配置,并處于等待狀態。運動控制功能是在伺服中斷服務程序中實現的。主程序和伺服中斷服務程序基本流程如圖4所示。

FPGA主要完成運動控制器的精插補功能,采用數字積分法進行插補。把數字積分法分為3個狀態:
(1)狀態WAIT,等待插補信號;
(2)狀態L1,判斷總的脈沖數;
(3)狀態L2,積分累加器累加一次,如有溢出,相應的輸出脈沖為高電平,剩余累加次數減1。
數字積分法的有限狀態機如圖5所示。
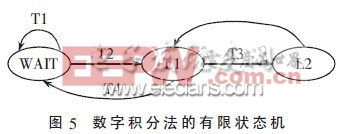
觸發條件T1:沒有啟動信號,下一狀態為WAIT,無操作;
觸發條件T2:有啟動信號,下一狀態為L1,操作為初始化各寄存器,置忙信號;
觸發條件T3:剩余累加次數大于0,下一狀態為L2,操作為各軸輸出脈沖為低電平;
觸發條件T4:剩余累加次數為0,下一狀態為WAIT,操作為各軸輸出脈沖為低電平,清忙標志;
無觸發條件:下一狀態為L1。
具體實現方法為:時序電路產生的插補脈沖作為此模塊的累加脈沖,每累加1次,剩余累加次數減1。當剩余累加次數為0時,此次插補過程結束。
4 結語
該運動控制器的結構設計可以模塊化和易于擴展,這樣可以滿足用戶的各種需求。在軟件部分中,采用有限狀態機的插補方法,在插補速度處理環節做了優化,使脈沖輸出更加穩定。
linux操作系統文章專題:linux操作系統詳解(linux不再難懂)
伺服電機相關文章:伺服電機工作原理





評論