基于TinyOS的CC2420驅動組件的研究

摘要: 首先介紹了nesC語言及專門面向傳感器網絡的TinyOS操作系統軟件平臺,然后闡述了網絡節點的硬件模塊功能特點及其接口電路,最后根據硬件抽象體系結構的原則,在TinyOS操作系統平臺下,對CC2420無線收發模塊驅動組件設計作了深入的研究,以組件的形式將其硬件功能封裝成接口供上層軟件調用,實現了對上層軟件的硬件特征屏蔽,從而實現該模塊功能的軟件語言表達和兼容性較強的跨平臺抽象體系結構。
本文引用地址:http://www.104case.com/article/149990.htm引言
網絡節點是構成無線傳感器網絡的基本單位,無線傳感器網絡節點有兩種常用體系結構:Atmel AVR處理器+TinyOS[1]和MSP430+TinyOS[2].本文采用 ATmega128L+TinyOS的體系結構。因此,CC2420驅動組件設計應符合TinyOS的硬件抽象體系結構(Hardware AbSTractiON Architecture,HAA)[3].TinyOS中將硬件抽象體系結構分為3層:硬件表示層(Hardware Presentation Layer,HPL)、硬件適配層(Hardware Adapation Layer,HAL)和硬件接口層(Hardware Interface Layer,HIL)。各層功能作用及具體設計原理在本文中作了細致的研究。CC2420是一款基于IEEE 802.15.4協議的低功耗無線收發模塊。本文根據硬件抽象體系結構的原則,對CC2420無線收發模塊在TinyOS平臺下的驅動組件設計作了深入的研究,這使得基于CC2420硬件的無線傳感器網絡(Wireless Sensor Network,WSN)應用程序的開發,可以與TinyOS操作系統的組件模型、主動消息、基于事件驅動等機制有效地結合起來,使應用程序具有代碼量小、能耗少、并發性高等特點。
1 nesC語言及TinyOS操作系統
早期的面向傳感器網絡的操作系統TinyOS是用匯編和C語言開發的。但經研究發現,C語言并不能高效地完成傳感器網絡的應用開發。所以研究人員對C語言進行了一定的擴展,提出了一種新型的編程語言--支持組件化編程的nesC(C language for network embedded Systems)語言[4].用nesC語言編寫的TinyOS[56],將輕量級線程、主動消息通信模型、事件驅動機制和組件化編程等技術相結合,是一種專門為無線傳感器網絡開發的微型操作系統,使面向傳感器網絡的操作系統及應用程序開發的復雜度大大降低,使程序的整體性能得到優化,提高了程序的健壯性和安全性。

圖1 TinyOS組件模型體系結構
TinyOS采用組件模型,這種模塊化的思想使得應用程序的編寫更加方便、高效。程序開發人員可以方便快捷地將獨立的組件組合到各種配件文件中,并在應用程序的頂層(toplevel)配件文件中完成程序的整體裝配。TinyOS的組件模型體系結構如圖1所示。
上層組件對下層組件發命令,下層組件向上層組件發信號通知事件,最底層的組件直接和硬件打交道。TinyOS中有3種類型的組件:硬件抽象組件、合成組件、高層軟件組件。硬件抽象組件將物理硬件映射到TinyOS組件模型;合成組件模擬高級硬件行為;高層軟件組件負責數據傳輸、控制、路由等。本文針對的是實際硬件上的抽象層。
2 節點硬件模塊
節點采用ATmega128L微處理器和CC2420無線收發模塊,硬件連接如圖2所示。
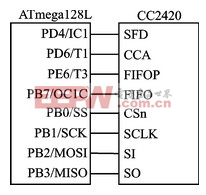
圖2 ATmega128L與CC2420的硬件連接
CC2420[7]無線收發芯片符合IEEE 802.15.4標準,工作在ISM 2.4 GHz頻段。其內部集成了壓控振蕩器、天線、16 MHz晶振等外圍電路。CC2420通過SPI接口與ATmega128L完成設置和收發數據兩方面的任務。如圖2所示,SPI接口由CSn、SI、SO和SCLK四個引腳構成。ATmega128L為接口主設備,訪問CC2420內部寄存器和存儲區;CC2420為SPI接口從設備,接收時鐘信號和片選信號,并在處理器的控制下執行輸入/輸出操作。
CC2420通過SFD、FIFO、FIFOP和CCA四個引腳與ATmega128L表示收發數據狀態。CC2420收到物理幀的SFD字段后,會在SFD引腳輸出高電平,直到接收完該幀。如果啟用了地址識別,在地址識別后,SFD引腳立即轉為輸出低電平。FIFO和FIFOP引腳標識FIFO緩存區的狀態。如果接收FIFO緩存區有數據,FIFO引腳輸出高電平;如果接收FIFO緩沖區為空,FIFO引腳輸出低電平。FIFOP引腳在接收FIFO緩存區的數據超過某個臨界值時或者在CC2420接收到一個完整的幀以后輸出高電平,觸發ATmega128L的中斷。CCA引腳有效表示信道空閑評估有效,通常為CSMACA算法的實現提供依據。
3 CC2420驅動組件
TinyOS中的硬件抽象體系結構分為3層:硬件表示層、硬件適配層和硬件接口層。本設計根據實際需求,完成了其中兩層結構的實現。
3.1 HPL組件
如前面所述,ATmega128L通過SPI接口訪問CC2420內部寄存器和存儲區,CC2420使用SFD、FIFO、FIFOP和CCA四個引腳表示收發數據狀態。硬件表示層的作用就是根據這種硬件連接將CC2420所提供的硬件基本功能以接口函數的形式封裝起來,供上層HAL組件調用,實現對底層硬件的隔離。
HPL體系結構如圖3所示。HPL組件包括3個模塊文件HPLCC2420FIFOM、HPLCC2420M、HPLCC2420Interrupt,分別實現CC2420的不同功能接口,最后由HPLCC2420C以組件的形式將所有的接口函數封裝起來,提供給HAL組件調用。
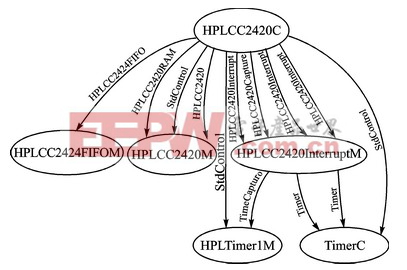
圖3 HPL體系結構 HPLCC2420FIFOM模塊文件實現了HPLCC2420FIFO接口,完成了對發送、接收數據緩存區的讀寫控制工作,主要接口函數如下: //將一串數據寫入發送緩存區TXFIFO, 完成后告知TXFIFODone()函數 async command result_t HPLCC2420FIFO.writeTXFIFO(uint8_t len,uint8_t *msg); //讀取接收緩存區RXFIFO中的數據,完成后告知RXFIFODone()函數 async command result_t HPLCC2420FIFO.readRXFIFO(uint8_t len,uint8_t *msg); HPLCC2420M模塊文件實現了3個接口: 1、 StdControl接口,完成ATmega128L中與CC2420相連的硬件引腳端口電平設置及硬件SPI接口相關寄存器的初始化工作。 2、 HPLCC2420接口,實現CC2420內部寄存器的讀寫功能。CC2420有33個控制/狀態寄存器、15個命令選通寄存器和2個訪問FIFO緩存區的寄存器。 3、 HPLCC2420RAM接口,實現對CC2420內部RAM的讀寫功能。CC2420的內部RAM分為3塊--128字節的發送FIFO緩存區、128字節的接收FIFO緩存區以及112字節的用于保存設備地址、密鑰等信息的存儲區。 主要接口函數如下: //寫CC2420的命令選通寄存器 async command uint8_t HPLCC2420.cmd(uint8_t addr) //寫寄存器 async command result_t HPLCC2420.write(uint8_t addr, uint16_t data) //CC2420內部RAM讀寫接口函數 async command result_t HPLCC2420RAM.write(uint16_t addr, uint8_t length, uint8_t* buffer); async command result_t HPLCC2420RAM.read(uint16_t addr, uint8_t length, uint8_t* buffer); //讀寫完成向上調用的事件通知 async event result_t writeDone(uint16_t addr, uint8_t length, uint8_t* buffer); async event result_t readDone(uint16_t addr, uint8_t length, uint8_t* buffer); HPLCC2420InterruptM模塊文件實現了HPLCC2420Interrupt、HPLCC2420Capture接口,主要完成中斷捕捉功能。CC2420使用SFD、FIFO、FIFOP和CCA四個引腳表示收發數據狀態,當引腳電平變化時,觸發ATmega128L硬件中斷。TinyOS平臺下,根據事件驅動機制,向上調用HPLCC2420Interrupt(類似HPLCC24240Capture)接口中的事件通告函數 result_t fired (void)進行上層處理。HPLCC2420Interrupt接口中使用result_t startWait(bool low_to high)函數設置觸發方式(上升沿還是下降沿),使用result_t disable(void)函數禁止中斷使能。HPLCC2420InterruptM模塊文件還調用了HPLTimer1M.nc和TimerC.nc文件中的Timer接口函數,完成相關的底層中斷處理。 3.2 HAL組件 HAL組件使用HPL組件HPLCC2420C提供的源接口,在CC2420所提供的基本功能的基礎上進一步抽象,形成CC2420初始化、設備地址設置、收發模式設置、發送接收消息等復雜功能,同時以組件接口的形式進行封裝供上層HIL組件調用。HAL體系結構如圖4所示。HAL組件包括兩個模塊文件CC2420RadioM.nc和CC2420Control.nc,最后由配置文件CC2420RadioC.nc裝配起來。 CC2420ControlM模塊文件使用SplitControl接口完成CC2420的寄存器初始化、啟動等工作,主要函數如下: command result_t SplitControl.init();//CC2420寄存器初始化 command result_t SplitControl.start();//開啟1.8 V穩壓源供電,將復位RSTN引腳置為高電平,啟動CC2420晶振 CC2420ControlM模塊文件還實現了CC2420Control接口,實現對CC2420的一些控制功能: command result_t CC2420Control.TunePreset(uint8_t chnl);//通信頻道設置 async command result_t CC2420Control.TxMode();//設為發送模式 async command result_t CC2420Control.RxMode();//設為接收模式 async command result_t CC2420Control.OscillatorOn();//開啟晶振 async command result_t CC2420Control.enableAutoAck();//自動應答幀功能使能 async command result_t CC2420Control.enableAddrDecode();//地址識別功能使能 command result_t CC2420Control.setShortAddress(uint16_t addr);//設置設備地址 CC2420RadioM使用BareSendMsg接口發送消息,使用ReceiveMsg接口接收消息: command result_t BareSendMsg.Send(TOS_MsgPtr msg);//發送消息 event result_t BareSendMsg.sendDone(TOS_MsgPtr msg,result_t success);//發送完成 event TOS_MsgPtr ReceiveMsg.receive(TOS_MsgPtr m);//接收消息事件通告 圖4 HAL體系結構 結語 首先以TinyOS操作系統為軟件平臺,根據網絡節點的硬件模塊功能及其接口電路的特點,在硬件抽象體系結構的原則下,對CC2420無線收發模塊在TinyOS 平臺下的驅動組件設計作了深入的研究。實驗表明,節點在滿足指標要求的同時運行穩定可靠。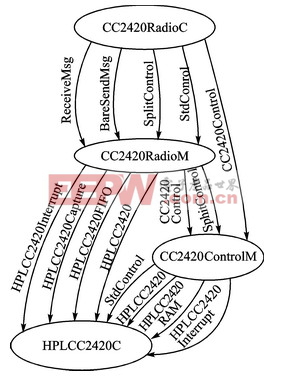









評論