基于嵌入式計算機PC/104的某火箭彈自動測試儀應用

引言
本文引用地址:http://www.104case.com/article/149958.htm變滾轉速率火箭彈中的陀螺是敏感元件,它的作用是測出火箭彈飛行過程中出現的偏航角,這個偏航角經過解算模塊的計算由控制器啟動執行機構進行姿態控制,從而達到修正偏航的目的。但陀螺是一次性產品,在研制和測試過程中它是不工作的,因此需要對陀螺信號進行模擬。對于偏航修正的結果也要進行判定,看它是否與理想的控制效果一致,是否存在超前或滯后現象。因此有必要研制一臺自動測試儀進行測試,除了以上兩個重要方面外,根據研制要求和測試要求本測試儀需要檢測的內容還有二次電源、控制器時序、主發動機內阻測試、姿態控制發動機內阻測試。
本測試系統采用嵌入式計算機PC/104,PC/104與PC/AT體系結構完全兼容,大小只有90mmX96mm,但它幾乎集成了普通臺式PC機的所有功能,并與之兼容,因此在PC機上開發的程序可以直接在PC/104 CPU模塊上運行,與單片機系統相比省去了專用的開發工具,而且維護方便。PC/104采用模塊化設計,硬件電路設計簡單,減少了開發周期。因此在本測試系統中我們采用嵌入式計算機PC/104。
2 系統設計
2.1硬件框圖,如圖1所示:
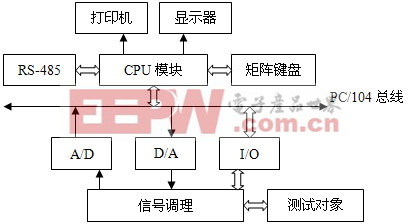
圖1 硬件框圖
系統中中心模塊采用盛博公司的SCM-6456,它采用增強型80486DX的CPU,32M的RAM;兩個串口,波特率可由軟件控制,其中COM2可設置為RS-485方式;一個并口;VGA支持彩色和單色LCD、EL平板顯示器和模擬CRT;在板IDE和Floppy接口;采集模塊選用盛博公司的ADT650,此模塊具有12位的分辨率,最大100KHz的采樣率,模擬輸入共有16通道,最大 10V輸入;4通道模擬輸出;24通道TTL/CMOS兼容I/O;3個16位、最大10MHz的定時/計數器;信號條理部分主要是將待測試信號變換成適合ADT650采集的信號;人機界面中,因為要求輸入字符很少,自行設計了4X4的矩陣鍵盤,顯示結果既可在顯示器上顯示,也可以用打印機打印。
2.1.1 定時/計數器的配置
本測試儀要求輸出頻率為5-13Hz的信號,則周期為200ms到80ms左右,如果采取1ms定時進行D/A轉換的辦法,最小的一個周期輸出80個點,經過實際測試,能夠滿足測試對象對模擬激勵信號的要求;另外在采集測試對象執行機構的控制信號時采用1ms定時采集的辦法,也能滿足最后數據判斷的要求,因此定時器定時時間為1ms(即定時器的輸出時鐘為1KHz)。而采集模塊ADT650上三個定時器的輸入時鐘都為10MHz,不能滿足要求,可以用級連的方法即將COUNTRT0的OUT與COUNTRT1的CLK輸入端、COUNTRT1的OUT與COUNTRT2的CLK端相連,其編程設置如下:(Base表示ADT650模塊的基地址,為0x330,下同)
outportb(Base+15,0x35); /* 定時器0 方波發生器 */
outportb(Base +12,00); /* 計數值低字節送計數器0*/
outportb(Base +12,10); /*計數值低字節送計數器0*/
outportb(Base +15,0x75); /* 定時器1 方波發生器 */
outportb(Base +13,10); /* 計數值低字節送計數器1*/
outportb(Base +13,0); /* 計數值低字節送計數器1*/
即10MHz的時鐘經1000分頻和10分頻后得到1KHz的時鐘;
2.1.2 模擬陀螺信號的設計
在火箭彈的研制和測試過程中,陀螺不工作,所以要求提供能夠模擬陀螺的激勵信號,有兩路:一路是偏航信號,一路是俯仰信號;這兩路信號經過試驗相位相差90度,頻率由5Hz到13Hz逐漸變大,幅值由1V逐漸變小。ADT650上的模擬輸出范圍是-5V到+5V,D/A轉換的分辨率是12位,則-5V~+5V對應的數據是0—4095,輸出0V對應2048;設周期為T,則通過程序計算
2048+(409-40*step)*sin(2*pi*i/T)
再計算DA數據的底8位(LSB)和高4位(MSB),分別寫入通道Base+1、Base+2,則數據被送到DA轉換器,并且每1ms輸出,就可以得到要求的信號;啟使時step=0,其中409表示輸出的幅值為1V,即1/5*2048=409;隨時間變化step加1,就能使幅值逐漸變小。當輸出一定周期數后,使頻率加1,這樣就達到頻率逐漸增大的要求,相應的T就變小。另一路與它的相位相差90度,其計算函數為
2048+(409-40*step)*sin(2*pi*(I+4/T)/T)。
2.1.3 偏航修正的測試
火箭彈測試中的最重要內容就是看執行偏航修正的結果是否與理論的控制結果一致。火箭彈中執行偏航修正的是通過兩對電磁閥的開關來改變姿態控制發動機的噴火方向,所以該測試儀就必須采集4路電磁閥的開關信號。ADT650集成了uPD71055可編程外圍接口,用PA0~3來采集電磁閥的開關信號,采用1ms中斷采集一次信號,最后將采集的控制信號與標準的控制信號進行比較,找出在切換時是否存在超前或滯后問題,以此來決定火箭彈性能的好壞。
2. 1. 4 模擬量采集
除了以上兩項重要的測試內容外,還需測試的有二次電源,主發動內阻,姿態發機內阻
測試。二次電源主要有 5V和 12V,而ADT650的最大輸入范圍是 10V,因此要分壓衰減后才能輸入到A/D輸入端;對于內阻的測試,采用轉換為測電壓的方法,最后在程序中轉換為所需實際電阻值;
對ADT650的A/D轉換利用直接編程的方法,首先寫Base+3來選擇輸入通道,對于多通道采集只需設置一次,下一次A/D轉換會自動轉如下一通道。設置完成后寫入Base+0任何值便啟動A/D轉換,等待Base+5的位0變為0時(即A/D轉換完成),就可以讀取數據并轉換為有意義的數據。
2.1.5 RS-485通信
本測試系統要與測試對象進行通信,為保證數據傳輸的可靠性,我們采用RS-485通信。SCM-6456模塊中有兩個串口COM1和COM2,其中COM2可通過跳線設置為RS485方式,其應用電路如圖2:
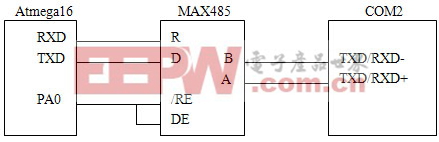
圖2 485通訊
2.2 軟件設計
根據PC/104的特點,本系統采用DOS6.22操作系統,TC2.0環境編程,模塊化設計,并將程序固化在電子盤中,啟動時也從電子盤啟動。主要包括初使化模塊、串行通訊模塊、數據采集模塊、數據處理模塊等,程序流程圖如圖3:
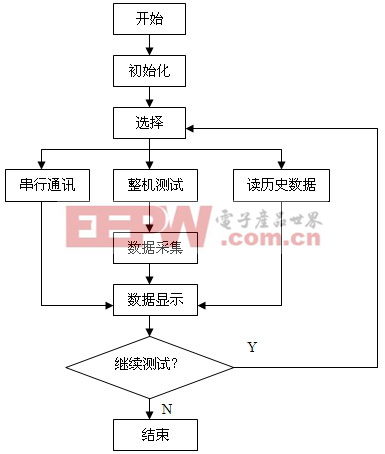
圖3 程序流程圖
3 結束語
采用PC/104計算機設計自動測試系統,具有體積小、功耗低的特點,適宜做成便攜式設備,方便野外應用。本測試儀還可在研制階段中代替信號發生器、示波器,方便數據分析。實際應用表明,該測試儀穩定、可靠。
linux操作系統文章專題:linux操作系統詳解(linux不再難懂)









評論