機車電子柜實時檢測系統設計

機車電子控制柜是機車(SS4G、SS6B等型號的機車)控制電路的核心,其主要功能是實現機車的牽引、制動控制及空轉、滑行保護控制等。由于整個電子控制柜由很多個模擬、數字電路插件板組成(絕大多數為模擬電路板),其本身就是一個極其復雜的電子設備,再加上其長期工作在高溫、振動和強磁的惡劣條件下,因而造成了機車電子控制柜的故障發生率極高(竄車、無流等故障)。而且診斷難度很大。傳統的監測方法是依靠一些儀器儀表,按照跟蹤信號逐點尋跡的思路,依靠人的邏輯判斷來判定設備的故障所在,該方法效率低,實時性不強,不能實時監測機車電子柜的運行狀態。因此,設計一個機車電子柜的實時監測系統是提高機車檢修效率和行車安全的關鍵。
1系統結構原理
本系統可由信號調理電路、信號采集板和存儲發送單元組成。電子柜信號經信號調理電路轉換成采集板可以采集的信號后,經信號采集板采集后,再通過CAN總線發送到存儲發送單元,然后通過標準RS-485接口發送到診斷單元進行故障診斷。數據采集也可以通過U盤從USB接口中取出,以便用到地面分析處理系統。整個系統的結構框圖如圖1所示。

2信號調理電路設計
通常電子控制柜的狀態信號有三種:模擬信號、開關量信號和脈沖信號。考慮到電子柜的重要性與特殊性。信號采集的前提條件是絕對不能對電子柜的實際工作產生干擾,因此,在信號采集前,必須對信號進行隔離。同時,考慮到插槽中的模擬信號較小,為了保證采集數據的精度,這些較小的模擬信號還需進行適當的放大。
2.1模擬信號調理電路
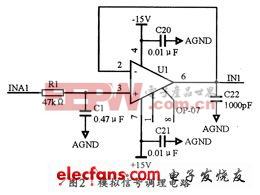
模擬信號的隔離調理可由運放構成的電壓跟隨器來完成,電壓跟隨器的特點是輸入阻抗高,可降低外加電路對電子柜系統的干擾,實現信號隔離。隔離運放可選用專用隔離運放,器件參數主要應考慮輸入阻抗等。由于待采集的模擬信號范圍為1~8V不等,為保證數據的可靠性,這些信號在采集前還需進行適當的放大,具體放大倍數應根據A/D轉換器的參數確定,一般為1~10倍,運放的選擇也應視實際情況而定。其中一通道的模擬信號調理電路圖如圖2所示。
2.2開關信號調理電路
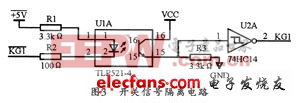
開關信號都是司機給定和電子控制柜發出響應的信號,或系統發出的比較慢的指令信號,這些信號高電平時為5V,低電平為0V,本設計使用TLP521-4來進行光電隔離,其開關信號隔離電路如圖3所示。當KGI為高電平時,光藕截止。此時可通過3.3kQ的下拉電阻R3使整形電路74HCl4的輸入為低電平;而當KGI為低電平時。光耦導通,整形電路74HCl4的輸入變為高電平。R2直接與電子控制柜信號相連接,可起保護作用。該電路的實驗測試結果表明,在直接測量整形后的電路時,其Ton=12μs,toff=35μs,可見其可以滿足系統開關信號的采集要求。
2.3脈沖信號調理電路
脈沖信號是電子控制柜產生的三段橋晶閘管觸發信號,具有高頻、高速等特點。其信號隔離需采用高速光電隔離器隔離,本系統選用高速光耦為6N137,其高速光電隔離電路如圖4所示。
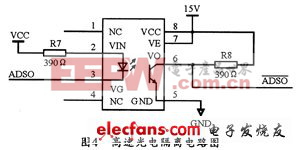
由于晶閘管的觸發脈沖是周期為40μs,占空比為50%的信號,而6N137的實驗參數測量結果大約為:ton=50ns;toff=50ns,由此可見,其可以滿足系統需求。
3信號采集電路設計
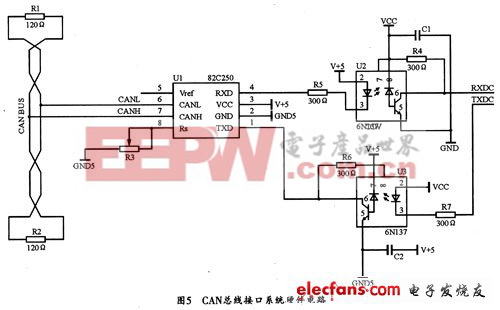
本系統采用的是以Philips公司生產的的P87C591單片機為控制核心的信號采集系統。P87C591是一個單片8位高性能微控制器。該器件具有片內CAN控制器,它采用強大的80C51指令集,并成功的包括了sJAl000型CAN控制器的PeliCAN功能。由于單片機P87C591中內嵌有CAN控制器sJAl000的信號輸出口且驅動能力較低,因此,本系統中加入了CAN總線接口驅動芯片P82C250,該器件主要是為高速通訊應用而設計的,它可對總線提供差動發送能力,并對CAN控制器提供差動接收能力。另外,為了增加通信距離,保護總線、降低干擾,提高系統的瞬間抗干擾能力,本設計還在P87C591和P82C250之間加入了由高速光耦6N137構成的隔離電路。其具體的CAN總線接口電路如圖5所示。
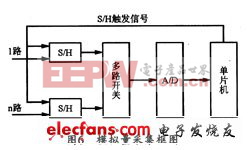
模擬量采集單元的主要功能可以劃分為微處理器及其控制部分、CAN通訊接口部分、多路模擬量輸入通道選擇開關、采樣保持芯片、模數轉換芯片等。根據單元劃分的粗細程度。需采集的模擬量共有30~60路不等。因此,在如此多信號需采集和對信號采集同步性要求較高的情況下,若采用一般采集方法,即由多路開關對信號進行選擇,然后經公共的S/H、MD器進行采集。那么,即使S/H、MD器的速度相當高,得出的結論也是不可靠的。所以,信號需采用同步采集。考慮到每路一個MD轉換器會增加系統的復雜性和成本,并且系統對信號采集的速度要求并不高,因此,MD轉換器還是共用一個為好,但若每路一個S/H,由單片機發出的觸發信號同時會觸發所有的S/H,保證這可采集的同步性。其信號采集框圖如圖6所示。
開關量采集單元可采用一片8255A來擴展PO口以對15路開關信號進行采樣,8255A的A、B、C口設定為模式O和輸人方式。8255A可擴展24個并行接口,實際上只能使用其中的15路,剩下的可作為備用接口。當單片機發出開關量信號采集命令時,開關量信號將從機車電子柜的29#和49#插槽引出,在經信號調理電路實現與采樣電路的電氣隔離后,8k8255A便可進入單片機。系統中的脈沖采集模塊與開關量采集模塊基本相似,在此不做贅述。
4存儲發送單元電路設計
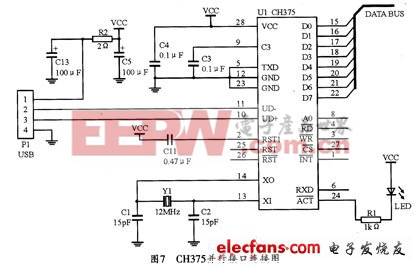
存儲發送單元主要包括微處理器及其控制部分、CAN通訊接口部分、串口擴展和USB接口等。其中微處理器及其控制部分、CAN通訊接口部分跟前面介紹的模塊基本一致。串口擴展部分帶有兩個RS-232接口和一個RS-485接口,并帶有跳線可以選擇兩種狀態為一個RS-232接口和一個RS-485接口或兩個RS-232接口而沒有RS-485接口。串口擴展采用16C550芯片。USB接口系統利用CH375作為控制器。并可通過串行輸入輸出或并行輸入輸出和中斷輸出來方便地實現USB移動存儲設備與單片機系統的連接。CH375的并行接口連接圖如圖7所示。
5系統軟件設計
整個監測系統工作時,先由模擬量采集單元將采集的數據按CAN標準幀格式發給存儲發送單元,當存儲發送單元等待并接收到模擬量采集單元采集的數據后,即可向開關量采集單元發送數據采集請求,并等待接收開關量采集單元的采集結果,最后,存儲發送單元再向脈沖量采集單元發送數據采集請求,并等待接收脈沖量采集單元采集結果。存儲發送單元在判斷數據是否正常之后,即可把接收到的數據存貯在CF存貯器內,最后寫串口。最后,再把數據通過標準RS-485接口發送到診斷單元或通過USB接口取出,以便應用到地面分析處理系統。
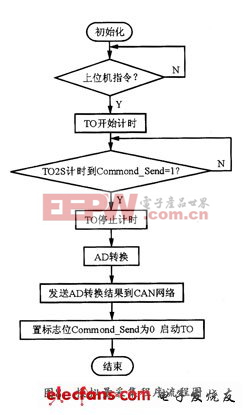
軟件設計就是在模擬量采集單元初始化后等待上位機發來的數據采集請求指令,然后啟動定時器TO并進行A/D轉換,再將轉換結果按CAN標準幀格式打包發送給存儲發送單元。其程序流程圖如圖8所示。其中,定時器TO的中斷子程序代碼如下:
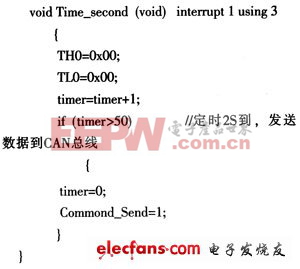
開關量和脈沖量的采集原理與模擬量的采集原理類似,這里不再詳細介紹。
6結束語
該監測系統為鐵道部引導課題,本系統經過實驗室內部聯調證明:其性能穩定,抗干擾能力強,目前已在機務段裝車運行,取得了良好的效果。本系統的不足之處是脈沖量的采集,只能檢測到電子柜是否有脈沖觸發信號的輸出,而不能采集到信號的波形。因此,該系統還有于待進一步完善。










評論