新型嵌入式超聲波測距系統

3。2PW0268外圍電路
PW0268的I_O管腳是雙向管腳,當一短暫的低電平脈沖加在此管腳時,Driver_O管腳開始輸出超聲波振蕩驅動信號,之后PW0268內部會啟動1個計時信號(Tout),之后I_O管腳由輸入轉變為輸出模式,并維持在高電平狀態。在Tout計時周期內,由外部對I_O腳做任何下拉動作均無法再度使Driver_O輸出振蕩波形,當等到Tout計時完畢之后I_O腳恢復成為輸入狀態將會再次啟動。當Driver_O送出超聲波驅動信號完畢之后,換能器由發射狀態變為接收狀態,收到的信號先送入PW0268的前置放大器,再通過時控增益放大器以及帶通濾波器,最后進行回波振幅偵測比較然后輸出。回波信號在經過放大器增益處理之后送入內置比較器,當輸入振幅超過設置的閾值后便將輸出轉態至高電平,此時I_O腳被拉至低電位。
C8051f320檢測到這個下降沿即認為收到回波信號,從而計算出距離值。PW0268內部原理及外圍電路如圖3所示。
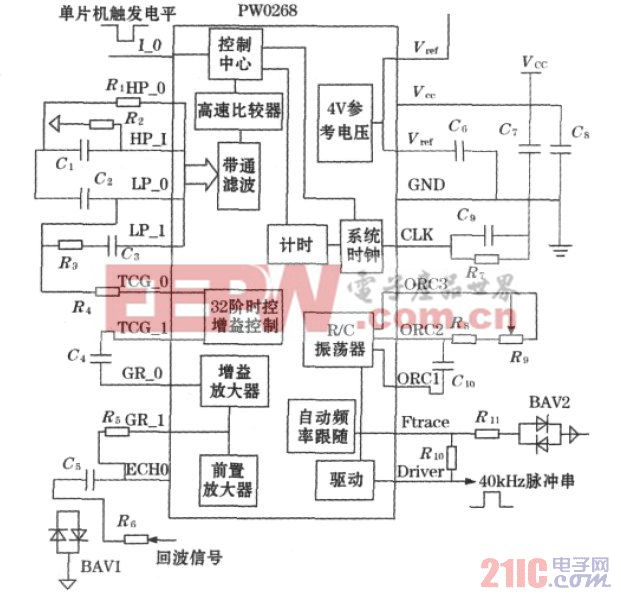
圖3 PW0268 外圍電路
PW0268用于超聲波測距的最大優勢是其內部集成了時控放大器,其增益是以220/F為步進遞增的,其中F是指PW0268的系統時鐘頻率,它是根據所要測量的最大距離計算得出的。
例如,在20℃標準大氣壓下,要測量的范圍是5m,則超聲波傳輸時間:

此時PW0268的時鐘頻率為:
進而可以算出增益步進的時間為:
因此對于最大測量距離為5m的測距系統而言,PW0268在發出脈沖串后,時控放大器的增益會每過0。92ms步進1個臺階,進而補償超聲波在波程中幅值的衰減。時控增益步進如圖4所示
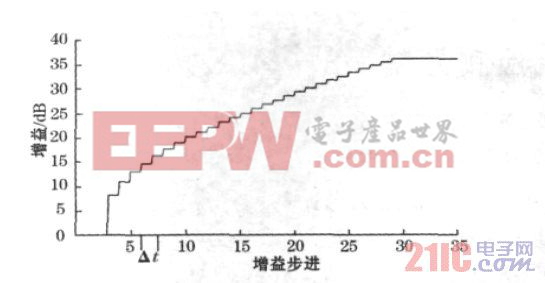
圖4PW0268的時控增益
系統的軟件由主程序、定時器計時程序、PCA捕捉中斷程序、環境溫度采集以及串行輸出和LCD顯示組成。
系統工作在連續實時測距狀態下,在初始化后,低電平觸發PW0268發出超聲波驅動信號,同時開啟PCA捕捉計時,系統開始等待接收回波信號,當在最大等待時間內接收到回波信號則停止計時,根據環境溫度修正聲速后,計算出距離值并輸出顯示,一次完整的測距過程完成;當在最大等待時間內收不到回波信號,則計時清零重新觸發。系統運行的流程圖如圖5所示。
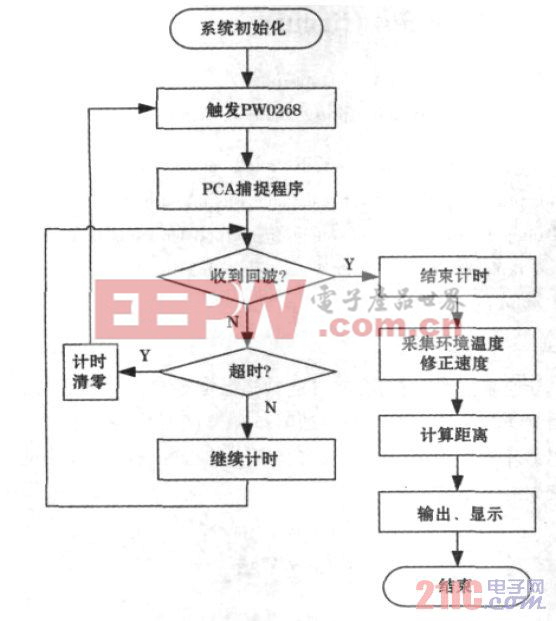
圖5系統流程圖
5實驗結果與分析
為標定超聲波測距系統測量精度,使用100cm×100cm×2cm硬平木板作障礙物進行測量,并用鋼卷尺測量實際距離作為標準值。經過試驗驗證,所設計的超聲波測距系統測量盲區約為300mm,在(500~5500)mm范圍內對系統進行了3次正反行程的標定試驗,并對實驗數據進行了分析和計算,測試數據如表1所示,擬合直線如圖6所示。由此計算出超聲波測距系統靜態特性指標,即線性度為:0。11%,重復性為:0。15%,遲滯為0。10%。
表13次正反行程實驗數據表

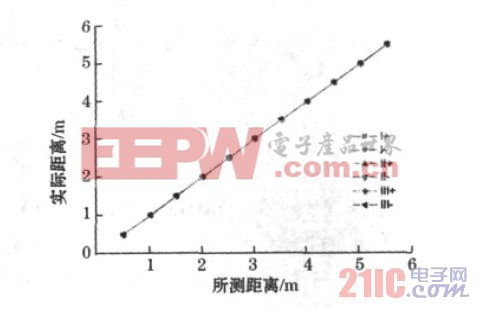
圖6三次正反行程實驗數據圖
6結束語
文中所設計的超聲波測距系統采用反激變換器不僅將發射超聲波的功率大幅度提高,而且有利于回波信號的判斷和接收,提高了測距系統的靈敏度和準確性。接收超聲波時使用時控增益放大器補償了信號在波程中的幅值衰減,準確獲得了回波信號,進而測算出了距離值。經過實驗測試,文中所設計的測距系統不僅測量方法簡單,電路結構清晰,成本較低,而且測距性能優良,可應用于工業非接觸測距等場所。
linux操作系統文章專題:linux操作系統詳解(linux不再難懂)





評論