數據融合在經緯儀引導中的應用

1引言
本文引用地址:http://www.104case.com/article/149201.htm經緯儀是一種精密測角儀器,可用來確定物體在空間中的位置、姿態及其運動軌跡。在新一代彈道導彈的實驗中對他的跟蹤和捕獲能力提出了新的要求。而經緯儀的跟蹤和捕獲能力在很大程度上取決于他的引導數據的準確性。通常經緯儀只能簡單的依靠某一個引導源(如引導雷達),這種測量系統往往比較脆弱,當引導源無效或受到干擾時,經緯儀都不能很好地完成目標跟蹤的任務。為了提高經緯儀的魯棒性,介紹一種多引導源經緯儀引導數據融合方法,通過在新一代經緯儀中的使用,大大改善了經緯儀跟蹤的穩定性和捕獲的快速性。
2系統的構成
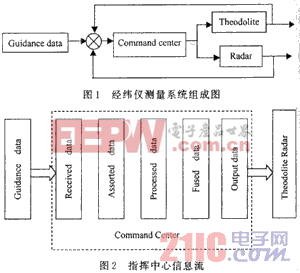
經緯儀測量系統包括經緯儀、雷達和指揮中心等部分,如圖1所示。其中指揮中心完成引導源異構數據的接收、整理分類和加工處理,在進行信息融合后為雷達和經緯儀提供精確的引導數據,如圖2所示。經緯儀和雷達的測量數據又作為一個引導源,從而實現數據的負反饋,使得整個系統可控。
3數據融合方法
數據融合就是模仿人腦綜合處理問題的能力,利用計算機技術對按時序獲得的多路傳感器的觀測信息對目標存在、特征、態勢和企圖在一定準則下加以分析和綜合,提供一種對現成數據進行協同處理、挖掘,以完成所需要的決策和估計任務而進行的信息綜合處理的過程。數據融合理論和實際應用證明:對有限次測量數據進行集中式數據融合處理,可以獲得比算術平均值算法更準確的測量結果。
數據融合操作的結果在很大程度上取決于數據源和控制邏輯。由于指揮中心與各個引導源不在同一地理位置,各引導數據時空不統一,在數據融合前務必進行數據標準化(空間位置多以笛卡兒坐標系為參考)。
3.1野值的剔除
經緯儀實驗時由于電磁干擾和數據傳輸的影響,不可避免地要產生野值,必須剔除野值,若不加以剔除,傳播到彈道參數上,必然會引起失真。
實踐證明,對于經緯儀的有限次測量數據,用分布圖法剔除野值不僅準確性高而且很有效,計算機編程也方便。以4臺經緯儀為例,假設他們都有效,則經緯儀的引導數據共有8組,分別為:理論彈道、雷達、經緯儀兩兩交會C24=6。將這些引導數據(以Y為例)按從小到大的順序排列成引導數據序列:
Y1,Y2,Y3,Y4,Y5,Y6,Y7,Y8
引導數據序列的閾值YM=Y4+Y52
區間[Ym,y8]的閾值Su=Y6+Y7/2,區間[Y1,YM]的閾值Sl=Y2+Y3/2,差值為dS=Su-Sl。
將yi一YM>dS的引導數據當成野值予以剔除,將Yi一YM≤dS的合理引導數據在指揮中心進行數據融合處理。
利用這種野值剔除方法可以有效地排除引導數據中的隨機干擾。而且,閾值YM和dS的選擇均與引導數據序列的極值點的大小無關,僅與引導數據的分布位置有關,而且有效區間的獲得與需要排除的野值的關系不大。因此用分布圖法來獲得一致性測量數據的方法能夠增強數據融合對不確定因素的適應性,即具有魯棒性。
3.2多數據源的數據融合方法
經緯儀引導數據的數據融合可以采用參數估計融合算法,即對8組引導數據,按照某種估計準則函數,利用引導數據序列對目標在空間的位置值作出估計,得到目標準確的位置值,消除引導過程中的不確定性。
為準確估計目標的位置值(以Y為例),對8組引導數據進行線性觀測,得到的引導值為Cj,Y,j=1,2,3,…,n,其中:Cj為常值。
由于觀測有誤差,實際所得的引導值為:Ej=CjY十cj,其中ej為觀測誤差,服從均值為0的正態分布。
依據Bayes后驗估計理論,可得到n個引導數據的狀態最優估計為:
^Yop,(E1E2E3。。。En)=maxP(Y│E1E2E3。。。En)(1)
Y^
即位置的數據融合問題,可以轉化為求出滿足Y的最大后驗概率maxP(Y│E)的估計值Y(E)的問題。
根據Bayes定理有:
由于n次觀測是獨立進行的,于是又得
到:
由式(2)和式(3)及Bayes定理可得
到:
其中:p(Y│Ej與P(Ej)均與Y無關,可視為歸一化因子,在求最大后驗概率Y^(E)時可不用考慮,容易求得n次經緯儀測量的融合值
為:
其中:COV(Yj,Ej)為2個隨機變量Yj與Ej的相關程度,即協方差。
3.3多引導數據融合實驗
例如,各個引導設備對空間某一點Y。=2170。0m進行定位,各引導數據的Y值如下表:
其中:T為理論彈道引導數據;R為引導雷達引導數據
Iij為第i個經緯儀和第j個經緯儀交會引導數據(i=1,2,3;j=2,3,4;i≠j);
Yi的單位為m(i=1,2,…,8)。
將Yi按照由小到大的順序,8組引導數據的排列順序為:Yl,Y6,Y3,Y8,Y7,Y4,Y2,Y5。
8組引導數據的平均值Y(8)=1/8∑/i=1Yi=2168.3m與Y0進行對比,引導誤差為一1.7m。
由圖3可知,大部分引導數據都集中在Y0附近,而Yl,Y5離Y0太遠,依據前面介紹的野值剔除的方法將Yl,Y5剔除掉,則y6,Y3,Y8,Y7,Y4,Y2的平均值Y(6)=∑Y/=2169。1m,引導誤差為一0.9m。
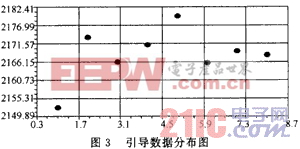
序列Y6,Y3,Y8,Y8,Y7,Y4,Y2都是合理的引導數據,均可參加數據融合,根據式(5)可以求得各引導數據的融合值Y^(E)=2169。7m,此時的引導誤差為-0。3m。
經緯儀相關文章:經緯儀原理






評論