基于MSP430F149的變頻伺服系統(tǒng)的設(shè)計與研究

2.3變頻器
變頻器是整個伺服系統(tǒng)的主要執(zhí)行元件。其工作原理是:在主電路中采用交直交變換方式將220V、50Hz的交流電通過整流器變成平滑直流,然后通過半導(dǎo)體IGBT組成的三相逆變器,將直流電變成可變電壓、可變頻率的交流電。其變頻控制方式主要有V/F控制、空間矢量控制(VC)及直接轉(zhuǎn)矩控制(DTC)方式。V/F變頻控制方式在低速時因定子電阻和逆變器死區(qū)效應(yīng)以及變頻器低壓導(dǎo)致的轉(zhuǎn)矩受定子電阻壓降影響較大等原因而使系統(tǒng)性能下降、穩(wěn)定性變差,從而只適用于轉(zhuǎn)速變化范圍小機(jī)械特性要求不高的場合。空間矢量控制(VC)方式由于在實(shí)際應(yīng)用中轉(zhuǎn)子磁鏈難以準(zhǔn)確觀測,系統(tǒng)特性受電動機(jī)參數(shù)的影響較大導(dǎo)致實(shí)際的控制效果難以達(dá)到理想水平。而直接轉(zhuǎn)矩控制(DTC)則摒棄了矢量控制中復(fù)雜的解耦運(yùn)算,直接在定子坐標(biāo)系下分析交流電動機(jī)的數(shù)學(xué)模型來控制電動機(jī)的磁鏈和轉(zhuǎn)矩,簡化了主電路、提高了系統(tǒng)的可靠性,從而適用于轉(zhuǎn)速和負(fù)載變化范圍較大的場合[4-5]。
綜上,本伺服系統(tǒng)采用臺達(dá)VFD-V型高頻變頻器。其內(nèi)含PID反饋控制及V/F、向量控制和轉(zhuǎn)矩控制等多種控制方式(系統(tǒng)采用轉(zhuǎn)矩控制方式),并且零速轉(zhuǎn)矩可達(dá)150%以上,保證了系統(tǒng)具有良好的靜態(tài)性能。
3系統(tǒng)軟件設(shè)計
為方便系統(tǒng)維護(hù)與升級,系統(tǒng)軟件設(shè)計采用模塊化程序結(jié)構(gòu),主要有主程序、電機(jī)伺服中斷服務(wù)程序、測速服務(wù)子程序等組成。
3.1主程序
主程序在完成系統(tǒng)初始化后,進(jìn)入上位機(jī)通信查詢及顯示子程序循環(huán),等待中斷的發(fā)生,電機(jī)速度采集采用定時中斷方式來實(shí)現(xiàn)。主程序流程圖如圖3a所示。
3.2電動機(jī)伺服中斷程序
變頻電機(jī)伺服中斷程序由MSP430F149內(nèi)部定時器A完成中斷并且執(zhí)行,電機(jī)控制中斷程序流程圖如圖3b所示。
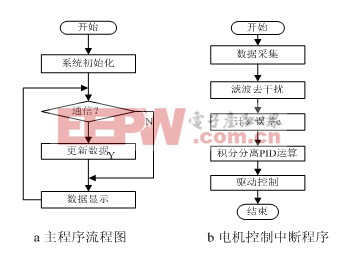
圖3程序流程圖
3.3數(shù)字PID調(diào)節(jié)器設(shè)計
在數(shù)字PID調(diào)節(jié)控制系統(tǒng)中,加入積分校正后,系統(tǒng)會產(chǎn)生過大超調(diào),這是伺服系統(tǒng)所不允許的[6-7]。為減少超調(diào)對控制系統(tǒng)動態(tài)性能的影響,需要在電機(jī)伺服過程中的啟動、停車或大幅度偏離給定時采用積分分離PID控制算法,只加比例、微分運(yùn)算取消積分校正。而當(dāng)被控制量接近給定值時,才使用積分校正以消除靜態(tài)誤差。為減少超調(diào)量,提高系統(tǒng)的穩(wěn)態(tài)控制精度,使系統(tǒng)擁有較高的控制品質(zhì)本伺服系統(tǒng)引進(jìn)積分分離PID控制算法。具體算法實(shí)現(xiàn)如下:
(1)根據(jù)實(shí)際情況,設(shè)定閥值ε>0。
(2)當(dāng)
(3)當(dāng)
控制算法公式:

4結(jié)束語
本文設(shè)計的交流變頻伺服系統(tǒng)將新一代高速單片機(jī)MSP430F149與臺達(dá)轉(zhuǎn)矩控制變頻器VFD-V型相結(jié)合,基于上位機(jī)通訊方式進(jìn)行控制,提高了系統(tǒng)的可控性能及穩(wěn)定性,以單片機(jī)代替了傳統(tǒng)的PLC控制,并與上位機(jī)聯(lián)動進(jìn)行系統(tǒng)參數(shù)調(diào)節(jié),實(shí)現(xiàn)了良好的人機(jī)人機(jī)交互平臺,同時降低了系統(tǒng)的開發(fā)成本以及周期,并在實(shí)際應(yīng)用中取得良好的控制精度及可靠性能,為伺服系統(tǒng)設(shè)計開發(fā)提供了更好的系統(tǒng)解決方案。
參考文獻(xiàn):
[1]郗志剛,周宏甫.運(yùn)動控制器的發(fā)展與現(xiàn)狀[J].機(jī)床電器.2005,(4):5-10.
[2]薛小鈴,劉志群,賈俊榮.單片機(jī)接口模塊應(yīng)用與開發(fā)實(shí)例詳解[M].北京:北京航空航天出版社,2010.
[3]吳宏,蔣仕龍,龔小云等.運(yùn)動控制器的現(xiàn)狀與發(fā)展[J].制造技術(shù)與機(jī)床.2004,(1):24-27.
[4]韓安太,劉峙飛,黃海.DSP控制器原理及其在運(yùn)動控制系統(tǒng)中的應(yīng)用[M].北京:清華大學(xué)出版社,2003.
[5]MaoJia,YuanSenmiao.DesignofaservoembeddedcontrolsystembasedonDSP[J].YiQiYiBiaoXueBao/ChineseJournalofScientificInstrument.2003,24:392.
[6]劉兵,尤波,宋繼良.基于DSP的伺服運(yùn)動控制器[J].哈爾濱理工大學(xué)學(xué)報.2005,10(3):114-116.
[7]潘松,黃繼業(yè),曾毓等.SOPC技術(shù)實(shí)用教程[M].北京:清華大學(xué)出版社,2005.本文引用地址:http://www.104case.com/article/149026.htm

伺服電機(jī)相關(guān)文章:伺服電機(jī)工作原理








評論