基于數(shù)據(jù)可視化處理的嵌入式智能查詢算法

一些對人類而言相當明顯的直觀推斷對于機器則并非如此。例如直觀推斷“當節(jié)點存在兩個(或更多)等權(quán)值邊線時,將執(zhí)行寬度優(yōu)先查詢,然后繼續(xù)查詢總權(quán)值最小的路徑”,這本身并沒有問題,但還是存在一個問題。如果最小成本的路徑偏離了目標節(jié)點怎么辦?這樣選擇得到的或許是一條更為昂貴的路徑。由此可見,還必須了解從當前節(jié)點至目標節(jié)點的方向。以這種形式開發(fā)直觀推斷是展現(xiàn)待解決問題所需核心知識的良好途徑。
解決公路網(wǎng)絡(luò)導向問題的一個有效途徑是動態(tài)計算當前節(jié)點和目標節(jié)點之間的距離和方位。這要求得到每個節(jié)點的經(jīng)緯度數(shù)據(jù),并對前進中的每一個節(jié)點進行浮點操作,因而極有可能是最不優(yōu)化的解決方案。更好的策略是根據(jù)經(jīng)緯度對之間的差異得到一套準則,這有助于提取最少準則所需的信息。
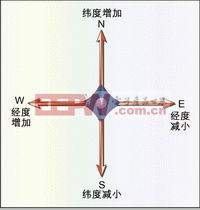
第一步必須明確方向和經(jīng)緯度之間的關(guān)系,圖4顯示了根據(jù)經(jīng)緯度差異得到的方向。
當向北方移動時,緯度將增加;向西方移動時,經(jīng)度增加;以此類推。從這些簡單的關(guān)系中可以看出,每個節(jié)點上完全可以去除許多不必要的操作。將以上知識與交通圖相結(jié)合,可以得到Scott和Jackson交叉口的起始緯度和經(jīng)度分別為N3747。514和W12226。356,而目標Fillmore和Vallejo交叉口則分別為緯度N3747。725和經(jīng)度W12226。002。根據(jù)圖4中的羅盤儀準則,現(xiàn)在目標交叉口位于起始交叉口的東北方向。
根據(jù)以上方向關(guān)系,可以得到如下六條準則:
準則1:如果緯度(目標)>緯度(現(xiàn)在狀態(tài)),那么目標為北方;
準則2:如果緯度(目標)緯度(現(xiàn)在狀態(tài)),那么目標為南方;
準則3:如果緯度(目標)=緯度(現(xiàn)在狀態(tài)),那么目標為空;
準則4:如果經(jīng)度(目標)>經(jīng)度(現(xiàn)在狀態(tài)),那么目標為西方;
準則5:如果經(jīng)度(目標)經(jīng)度(現(xiàn)在狀態(tài)),那么目標為東方;
準則6:如果經(jīng)度(目標)=經(jīng)度(現(xiàn)在狀態(tài)),那么目標為空;
可以將上述基本準則相結(jié)合以得到更為復雜的方向,如東北和西南。這只需要將基本準則通過與操作結(jié)合起來,這樣有效的組合如下:
規(guī)則1^規(guī)則4->目標為西南
規(guī)則1^規(guī)則5->目標為東北
規(guī)則1^規(guī)則6->目標為北
規(guī)則2^規(guī)則4->目標為西南
規(guī)則2^規(guī)則5->目標為東南
規(guī)則2^規(guī)則6->目標為南
規(guī)則3^規(guī)則4->目標為西
規(guī)則3^規(guī)則5->目標為東
規(guī)則3^規(guī)則6->目標為空
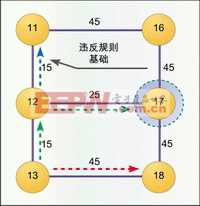
將基本準則和復雜準則結(jié)合起來就能得到成功的查詢方法。如果目標在當前節(jié)點的西北方向,那么向北方和東方移動是合法的。這里我認為應(yīng)該是:“如果目標在當前節(jié)點的東北方向,向北方和東方移動是合法的”,而向南方和西方移動則不合法。
當查詢到節(jié)點12,選擇的邏輯路徑則是從節(jié)點12至節(jié)點11并且權(quán)值為15的邊線。此時方向為北方,這看來是合法的,且邊線權(quán)值達到最小。其實這完全是錯誤的,因為查詢偏離了目標節(jié)點。現(xiàn)在我們利用規(guī)則對查詢進行限定,節(jié)點12與節(jié)點17平行,因此準則3成立。此時經(jīng)度減少,因此規(guī)則5成立。如果規(guī)則3和規(guī)則5都成立,那么目標是正東方。規(guī)則基礎(chǔ)很好地完成任務(wù):避免了“盲目”查詢或?qū)?ldquo;盲目”查詢進行導向。結(jié)果如圖5所示。
本文小結(jié)
如上所述,圖形表示法和盲目查詢算法本身并不足以解決大多數(shù)問題。但將這些技術(shù)同直觀推斷以及特定問題的規(guī)則集相結(jié)合,就像上面所做的那樣,就能得到有效的人工智能。類似的技術(shù)可應(yīng)用于諸多應(yīng)用領(lǐng)域。盡管本文的示例集中于靜態(tài)數(shù)據(jù),但當邊線及邊線權(quán)值改變并且不能對規(guī)則進行硬編碼時,這里給出的技術(shù)仍然有效。
顯然,嵌入式系統(tǒng)通常受制于某些特殊限制。嵌入式編程中一般不允許遞歸算法,盡管這是圖形查詢算法中的一種常用技術(shù)。關(guān)鍵應(yīng)用中的嵌入式系統(tǒng)也不支持動態(tài)內(nèi)存分配,但如果沒有動態(tài)內(nèi)存分配的話,將很難在鏈表數(shù)據(jù)表示法中添加和刪除節(jié)點。出于以上考慮,可以得到如下嵌入式智能的應(yīng)用技巧:
1。考慮將部分處理移交至功能更為強大的系統(tǒng),也許嵌入式系統(tǒng)只需要解決部分需要快速解決的問題。
2。避免遞歸,任何遞歸函數(shù)都應(yīng)當用迭代函數(shù)進行重寫。
3。盡可能減小動態(tài)內(nèi)存分配。如果鏈表的長度相對保持恒定,就可用數(shù)組進行代替,使數(shù)組的大小等于鏈表的最大長度,一旦超過該最大長度就返回操作失敗。
4。將智能視為低能動物而非超級計算機,即將其想像為處理意外情況或干擾的低等動物形式。
5。最重要的是,有效地綜合“盲目”算法、“貪婪”算法和智能查詢算法。當然,也沒有任何規(guī)定限制只能采用一種方法解決需要利用智能的問題。
linux操作系統(tǒng)文章專題:linux操作系統(tǒng)詳解(linux不再難懂)







評論