基于DSP和CPLD的光纖陀螺信號采集系統設計

摘要:隨著光纖陀螺在空空導彈中的廣泛應用,為了對其特性進行深入研究,設計了一種光纖陀螺信號采集系統。硬件結構采用了DSP+CPLD的方式,控制AD芯片完成多路光纖陀螺數據的采集。為了降低干擾對采集精度的影響,在硬件以及軟件方面進行了抗干擾設計。通過對該系統的測試驗證,性能指標滿足使用要求。本系統設計新穎、實用,操作簡單快捷。
關鍵詞:光纖陀螺;DSP;CPLD;信號采集系統
0 引言
光纖陀螺作為一種新型的慣性器件,近年來得到越來越多的關注,因為它有許多其他陀螺無法比擬的優越性,比如結構簡單,精度高,動態范圍大,抗電磁干擾,無加速度引起的漂移且成本低,可靠性好等。陀螺可以為載體提供準確的角速度和角位移等信號,完成對運動體的姿態和運動軌跡控制。其優良的品質使自身能夠滿足軍工和民用對慣性器件苛刻的要求,并得到廣泛的應用。
慣性器件的性能直接影響到控制系統本身的穩定性能,所以光纖陀螺被應用到空空導彈中時,需要對陀螺的特性有充分的了解,為此構建了一個陀螺采集系統,以實現對陀螺信號的采集及特性分析。
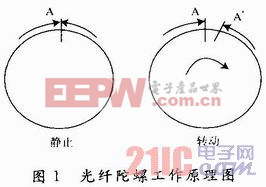
1 光纖陀螺的工作原理
光纖陀螺是激光陀螺的一種,其基本原理基于Sagnac效應,即用光纖繞制成環柱形光路,光源發出的光經過分束器分為兩束之后,送到光纖中,隨著陀螺的轉動,分別沿順時針和逆時針方向傳輸,經過一周后,這兩束相反方向傳播的光回到分束器中形成干涉,當光纖形成的環狀回路不轉動時,順、逆光程到達分束器的時間相等,兩束光的相位差為零;當環狀回路轉動時,順、逆光程就產生差異,在一段時間內分束器已從A點轉到了A’點,對順時針傳播的光束,當它再次到分束器時多走了AA’的路程(如圖1所示)。可以根據兩束光的相位差來獲得回路轉動的角速度。光纖的檢測靈敏度和分辨率比激光陀螺提高了幾個數量級。
2 系統構成及其工作原理
本文設計的信號采集系統通過雙口RAM實現上位機與DSP的通信,控制板采用DSP+CPLD的方式,控制AD芯片完成多路光纖陀螺數據的采集。系統工作流程為DSP接收到上位機通過雙口RAM傳來的采集指令,通過地址/數據總線與CPLD進行通信,控制AD芯片對外部的多路陀螺信號進行采集,之后通過雙口RAM送到上位機,上位機實現各種圖形界面操作和后端信號處理,對所采集的信號進行分析。系統原理框圖如圖2所示。












評論