AVR看門狗使用范例 avr wdt看門狗詳解

AVR看門狗 一個硬件單元,當程序由于某種原因跑“飛”了,它就Reset程序。就像小狗看門一樣。
本文引用地址:http://www.104case.com/article/148586.htm//Watchdog iniTIalize
// prescale: 2048K
void watchdog_init(void)
{
WDR(); //this prevents a timout on enabling
WDTCR = 0x0F; //WATCHDOG ENABLED - dont forget to issue WDRs
}
上面是用ICC的App Builder生成的看門狗初始化程序,這些語句達不到初始化看門狗的目的,需要在中間加一句WDTCR = 0x1F; 。最后一行代碼提醒狗主人,別忘了及時清零看門狗定時器(喂狗),否則,小狗就咬人了。
一個相對獨立的計數自動重啟單片機的硬件部件,如果啟用它后,不在一定的時間內清除它的計數值,就會達到計數的最高值而溢出,然后它就指揮單片機重啟。 所以要在你的程序里適當的加入清看門狗的指令,一旦你的單片機程序出了問題,當然就不能按照你的程序原先設定那樣自動清看門狗了,也就是常說的程序跑飛了,這個時候看門狗就會重啟單片機試圖解決問題。一般只對瞬間干擾造成的問題有效,要是長時間的干擾或是軟硬件問題,看門狗的意義不是很大。
我的理解 就象是監視程序執行的保安一樣, 程序正常執行時會在他的益處時間之內給他一 個復位信號,當程序跑飛的時候他在溢出時間之內是收不到復 位信號的,這時看門狗就會在設定的時間內產生系統復位的信號!
AVR的看門狗是軟狗,也是硬狗! 如果熔絲位不設定,就是軟狗,因為程序可以關閉,也可以打開 如果熔絲位設定了,就是硬狗,因為程序只可以清除,而無法打開或關閉!
是不是在程序中加入 WDR(); 就算“喂狗”了?喂狗好象要計算好時間吧?我每執行一個函數就喂狗一次如何?
如果你的循環體內每循環一次的時間不超過看門狗的復位時間,主要喂狗一次就可以了。
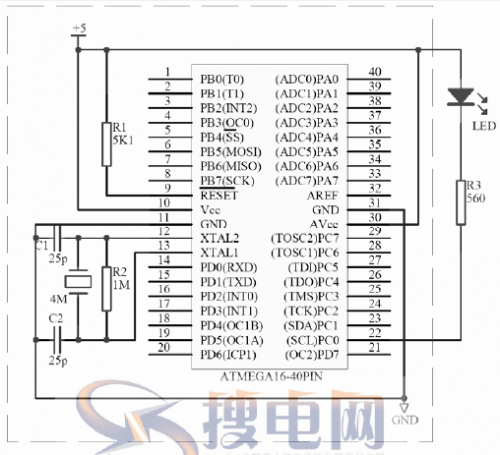
AVR看門狗程序范例,程序演示了看門狗的復位過程,使用了本站新手入門的第一個范例,普通情況下,程序最后陷入死循環,但是這個程序里,看門狗讓單片機復位,你會看見LED一直閃動,效果和第一個范例程序相同。
就兩點,初始化,然后喂狗,喂狗要在看門狗咬人之前,(復位之前喂狗)。
// 看門狗復位演示程序。
#include
#include
void port_init(void)
{
PORTA = 0x03; //設置為輸出
DDRA = 0x03; //高電平,兩個LED都滅
PORTB = 0x00;
DDRB = 0x00;
PORTC = 0x00;
DDRC = 0x00;
PORTD = 0x00;
DDRD = 0x00;
}
//Watchdog initialize
// prescale: 2048K //預分頻越大,定時時間越長,也就是可以更長時間不喂
// 約為2.1s復位 (根據數據手冊,2048K,5V典型值)
void watchdog_init(void)
{
WDR(); //this prevents a timout on enabling
WDTCR = 0x1F; //特別注意這一條不是ICC生成的,是后來加上的。
WDTCR = 0x0F; //WATCHDOG ENABLED - dont forget to issue WDRs
}
//加入了喂狗的延時程序
void Delay(void)
{
unsigned char i,j;
for(i=200;i>0;i--)
{
for(j=200;j>0;j--)
;
}
WDR(); //這里喂狗
}
//call this routine to initialize all peripherals
void init_devices(void)
{
//stop errant interrupts until set up
CLI(); //disable all interrupts
port_init();
watchdog_init();
MCUCR = 0x00;
GICR = 0x00;
TIMSK = 0x00; //timer interrupt sources
SEI(); //re-enable interrupts
//all peripherals are now initialized
}
void main(void)
{
unsigned int i;
init_devices(); //初始化
for(i=10;i>0;i--) //看到程序的閃動
{
PORTA = 0x02; //1腳為高,0腳為低,0腳燈亮
Delay(); //延時
PORTA = 0x01; //0腳為高,1腳為低,1腳燈亮
Delay(); //延時
}
while(1) //普通情況下,程序會陷入這里一直循環。
; //看門狗能夠讓單片機復位,程序重新運行,我們看到LED閃爍。
//如果在這里加入WDR(); 喂狗,單片機就不會復位了。
}
補充,特別說明
使能看門狗不能用 |=,必須要直接賦值=。
還有數據手冊上說:
改變定時器溢出時間及禁止(已經使能的)看門狗定時器需要執行一個特定的時間序列:
1. 在同一個指令內對WDCE 和WDE 寫1“,即使WDE 已經為1“。
2. 在緊接的4 個時鐘周期之內將WDE 和WDP 設置為合適的值,而WDCE 寫0”。
所以在WDTCR=0x0E;之前加上一句WDTCR=0x1F;
void watchdog(void)
{
WDR(); //看門狗計數清零
WDTCR=0x1F; //使能watchdog,并且,采用2048K分頻,典型溢出時間5V時2.1S
WDTCR=0x0F; //使能watchdog,并且,采用2048K分頻,典型溢出時間5V時2.1S
}





評論