基于DM6446的視頻運動車輛檢測系統

3.3 形態學濾波
僅對背景差圖像做二值化處理是不夠的,在二值圖中可能出現因錯判而導致的空洞和細小的噪聲,須進一步經形態學濾波處理以連接相關區域和去噪,具體的操作是腐蝕和膨脹。腐蝕的作用是從二值圖像中消除不相關的細節,膨脹可以使裂縫橋接起來。先腐蝕后膨脹的過程具有消除細小物體,在纖細點處分離物體和平滑較大的邊界時又不明顯地改變其面積的作用。先膨脹后腐蝕的過程具有填充物體內部細小空洞、連接鄰近物體、在不明顯改變面積的情況下平滑其邊界的作用。本文中選擇3×3 像素大小的結構元素先后對二值圖進行腐蝕和膨脹操作。
3.4 區域生長法目標定位
定位是指獲取視頻運動目標的空間位置,本文采用區域生長法對目標進行位置標記。區域生長法(Region Growing)是一種有效的圖像分割算法,算法將有相似性質的像素或子區域集合起來構成區域并不斷擴大區域范圍。基本方法是以一組種子點開始將與種子性質相似的相鄰像素附加到生長區域的每個種子上,逐步構成區域,在沒有像素滿足加入某個區域的條件時停止生長。種子點的自動選擇應滿足3 條準則:
① 種子與其鄰域必須有高相似度;② 在想得到的區域內,至少要能產生一顆種子;③ 不同區域的種子不能連接。
經形態學濾波處理后,二值圖的視頻運動車輛區域有了較好的空域連通性,采用區域生長法進行定位的目的就是要確定出前景目標區域并給予標記。本文對前景區域采用矩形框進行標記:在四鄰域連通區域內尋找坐標的最大值max(x,y)和最小值min(x,y),據此在圖像中繪制白色直線段并連接成矩形框。區域生長法目標定位可簡單總結為以下4 個步驟[4]:
① 將標記矩陣C(x,y,tk)初始化為待標記的二值圖像(設種子點灰度值為255);② 根據種子點灰度值逐行掃描C(x,y, tk)圖像,若搜索到符合條件的像素點則以其為中心檢查鄰域像素,滿足合并條件的鄰域像素坐標壓入堆棧,并設置為背景點;③ 利用步驟②的前景點位置坐標得到目標矩形框位置坐標(xman,yman)、(xmax,ymax),矩形框坐標入棧,返回②;④ 逐個取出矩形框位置坐標,進行矩形框繪制。
4 實驗結果與分析
為進一步說明本文基于DM6446 實時視頻運動車輛檢測系統的實際檢測效果,本文針對不同交通視頻序列進行了檢測實驗。由于不便在實際交通現場進行效果測試,實驗時使用新浪S008DVD 機提供視頻輸入信號,DVD 機播放指定的交通視頻序列。DVD 的輸出通過AV 線連接到視頻板的復合視頻信號接口,處理結果由連接在VGA 口的液晶顯示器顯示。本文共用到3組視頻序列: Highway 、Video.long.mjpg 和Hzhighway.其中Highway 來自http://cvrr.ucsd.
edu/aton/testbed/,video. long.mjpg 為劉瑞禎編寫的《OpenCV 教程:基礎篇》光盤所提供的測試序列,Hzhighway 為自拍視頻序列。
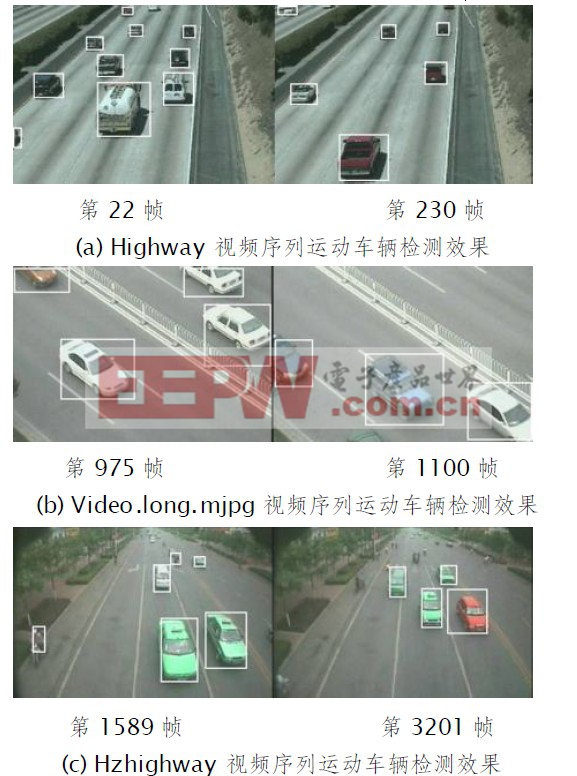
圖4(a)~(d)示意了在DM6446 上進行視頻運動目標檢測的處理流程。圖5(a)、(b)和(c)分別給出了對Highway、Video.long.mjpg 及Hzhighway 各視頻測試序列的運動車輛進行檢測的效果。
Highway 背景較為簡單,車輛都處于運動狀態且行進方向與攝像機鏡頭朝向相同,檢測效果較好,雖然存在少量連體問題,但基本定位準確,如圖5(a)所示,可以看到白色矩形框將車輛包含在其中,并隨著車輛遠離攝像機而逐漸縮小。
Video.long.mjpg 取景范圍較小,同時車輛行駛速度較快,有時不能完整框住車輛。在自拍序列Hzhighway 中車輛定位準確但有時存在矩形框不能框住單一車輛和大小不穩定的情況,如圖5(c)所示。經過綜合分析得到如下結論:① 倘若背景更新速度不夠快,易導致當停駛車輛變為背景后又恢復運動狀態時背景不能及時更新為路面的情況。②有些車輛車體顏色與路面相近,在更新時部分車體會被誤當成背景。
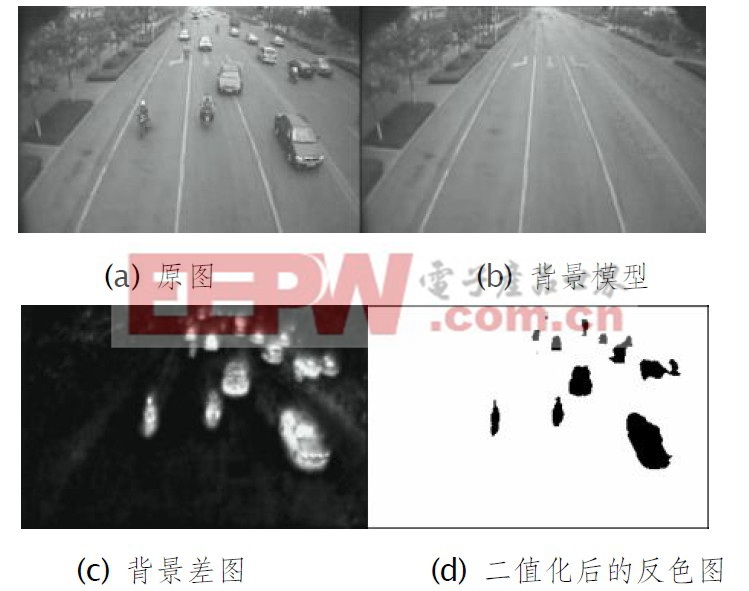
圖4 視頻運動車輛檢測過程示意圖
5 結語
本文給出了一種基于DM6446 的視頻運動車輛檢測系統的技術實現方案,描述了系統軟硬件平臺的搭建思路。本文所給出的實驗效果說明了本系統的技術可行性及其良好檢測性能。雖然本系統在幾組視頻測試序列中獲得良好的檢測效果,但本系統對環境光照的突變、樹枝搖擺的干擾等仍缺乏適應性,算法需做進一步考慮,同時程序也需針對DM6446 硬件平臺做進一步優化,這也是作者進一步的研究工作。






評論