基于DSP的無刷直流電機(jī)控制器設(shè)計(jì)與實(shí)現(xiàn)

2 系統(tǒng)構(gòu)成
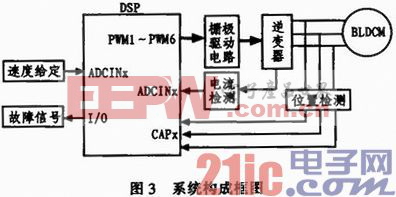
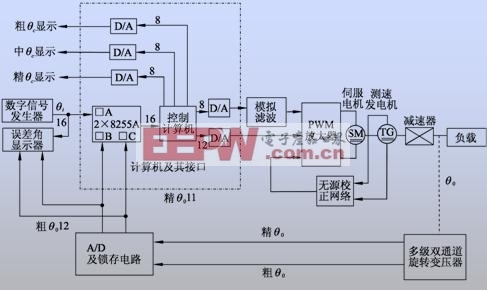
圖3為系統(tǒng)構(gòu)成框圖。控制器采用高性能的數(shù)字信號處理器TMS320F2812作為控制核心,電流采樣及位置檢測采用了芯片內(nèi)置模塊,實(shí)現(xiàn)了高度的集成化;以高精度霍爾傳感器作為系統(tǒng)位置反饋元件;以高精度檢測電阻作為電流反饋元件;構(gòu)成數(shù)字化速度和電流雙閉環(huán)控制系統(tǒng)。考慮到電機(jī)PWM驅(qū)動(dòng)信號的載波頻率比較高,功率模塊選擇了MOSFET開關(guān)管。
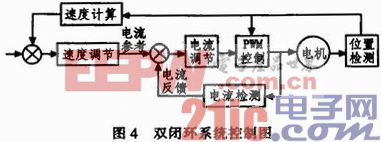
由圖4可以看到這是一個(gè)典型的雙閉環(huán)調(diào)速系統(tǒng),包括一個(gè)速度調(diào)節(jié)環(huán)和一個(gè)電流調(diào)節(jié)環(huán)。首先根據(jù)檢測到的轉(zhuǎn)子位置信號,計(jì)算得到電動(dòng)機(jī)的當(dāng)前轉(zhuǎn)動(dòng)速度,然后與速度參考值比較得到速度偏差值,經(jīng)過一個(gè)PID控制器后得到相應(yīng)的電流參考值。該電流參考值與實(shí)際的電動(dòng)機(jī)的電流反饋值進(jìn)行比較,偏差的值經(jīng)PID調(diào)節(jié)后將生成的PWM信號加到電動(dòng)機(jī)的功率驅(qū)動(dòng)主回路上。通過控制功率管的開通順序和時(shí)間,可改變電動(dòng)機(jī)定子繞組中的電流大小和繞組的導(dǎo)通順序,從而實(shí)現(xiàn)對直流無刷電動(dòng)機(jī)轉(zhuǎn)速的控制。
3 系統(tǒng)各模塊實(shí)現(xiàn)
3.1 電流的檢測和計(jì)算
電流的檢測是采用精度較高的檢測電阻來實(shí)現(xiàn)的,將檢測電阻串聯(lián)接到直流母線中。電阻值的選擇考慮了當(dāng)過流發(fā)生時(shí)能輸出的最大電壓。
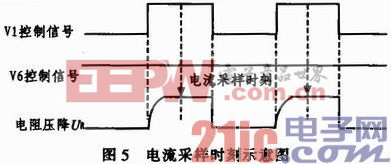
每—個(gè)周期對電流采樣一次。本設(shè)計(jì)中PWM周期為50μs,則電流的采樣頻率為20 kHz。開關(guān)管采用PWM控制,載波為三角波。在PWM周期的“開”的瞬間,電流上升并不穩(wěn)定也不易采樣。所以電流采樣時(shí)刻應(yīng)該是在PWM周期的“開”的中部,如圖5中的箭頭即為電流采樣肘刻。電流采樣通過DSP定時(shí)器采用連續(xù)增減計(jì)數(shù)方式的周期匹配事件啟動(dòng)ADC轉(zhuǎn)換來實(shí)現(xiàn)。
3.2 位置檢測和速度計(jì)算
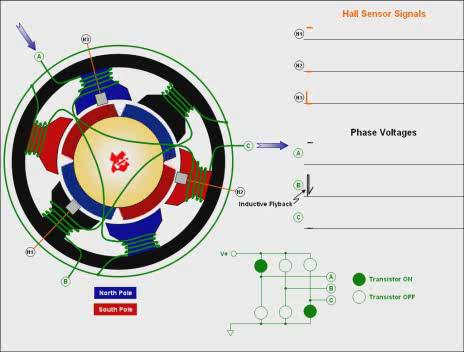
無刷直流電機(jī)需要不斷地對三相無刷直流電動(dòng)機(jī)進(jìn)行換向。掌握好恰當(dāng)?shù)膿Q相時(shí)刻可以減小轉(zhuǎn)矩的波動(dòng)。因此位置檢測是非常重要的。同時(shí)通過位置檢測信號計(jì)算出當(dāng)前電機(jī)的速度數(shù)據(jù)。
位置信號是通過3個(gè)霍爾傳感器得到的。每一個(gè)霍爾傳感器都會產(chǎn)生180°脈寬的輸出信號,3個(gè)霍爾傳感器的輸出信號有120°相位差。通過將DSP設(shè)置為雙沿觸發(fā)捕捉中斷功能,就可以獲得這6個(gè)時(shí)刻。通過將DSP的捕捉口CAP1~CAP3設(shè)置為I/O口、并檢測該口的電平狀態(tài),就可以知道每個(gè)霍爾傳感器的電平狀態(tài)從而得到當(dāng)前轉(zhuǎn)子的位置。
利用位置信號來計(jì)算電機(jī)當(dāng)前的轉(zhuǎn)速。電機(jī)每個(gè)機(jī)械轉(zhuǎn)有六次換相,也就是轉(zhuǎn)子轉(zhuǎn)過60°機(jī)械角就有一次換相。通過DSP的定時(shí)器測得兩次換相的時(shí)間間隔,就可以計(jì)算出兩次換相間隔期間的平均角速度。
3.3 其他系統(tǒng)模塊的設(shè)計(jì)
本系統(tǒng)中電機(jī)的轉(zhuǎn)速設(shè)置有兩種方式,一種是采用電位計(jì)分壓的方式,由于DSP2812的A/D模塊的電壓采樣范圍是0~3.3 V,所以電位計(jì)供電也為3.3 V。另外一種方法是采用DSP2812內(nèi)置的SCI模塊與上位機(jī)PC端進(jìn)行通訊,通訊方式采用RS485通訊總線。RS485總線采用差分傳輸,抗干擾能力強(qiáng)、傳輸距離遠(yuǎn)。電流設(shè)置也采用DSP2812的A/D模塊采樣電位計(jì)分壓的方式。

pwm相關(guān)文章:pwm是什么
脈寬調(diào)制相關(guān)文章:脈寬調(diào)制原理



評論