基于嵌入式系統的負壓吸引器設計

2.4 控制部分
人機交互模塊:用于用戶指令的輸入,顯示所測量的體內體液參數。顯示模塊使用諾基亞5110液晶顯示屏實現,與主控模塊之間的通信通過SPI接口實現,具有功耗低、控制簡便等優點。
異常報警模塊:主要由有源蜂鳴器及一個NPN型三極管8050構成。當主控模塊輸出報警信號時,給8050基極施加高電平,有源蜂鳴器發出洪亮的報警聲,提示醫護人員進行相應操作。
主控模塊:主要以STM32為核心,完成本系統的數據分析、功能控制、顯示及針對系統數據的反饋處理。STM32 F103是一款32位單片機,AD數據采集的精度極高。具有2個12位AD轉換器(16通道)以及6路PWM輸出和7個定時器,足以實現對各功能模塊的自動控制、信號采集和處理。
本系統軟件開發是基于Keil for ARM的開發環境下完成的。主要使用C語言編寫。軟件包括各個模塊的底層驅動及數據的采集和處理。系統軟件流程圖如圖7所示。
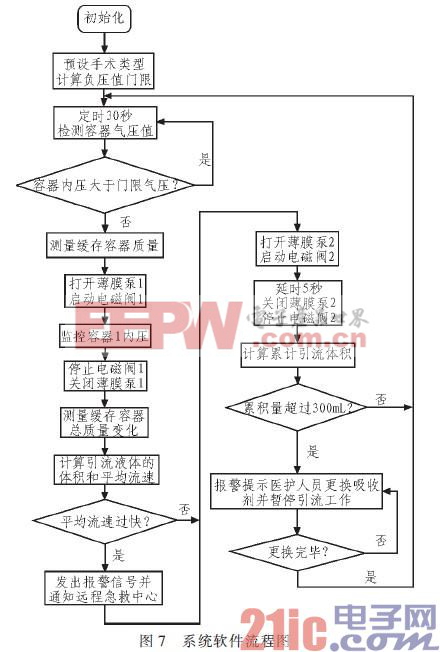
系統上電初始化,使用定時中斷方式掃描按鍵輸入,并定時在液晶顯示屏上更新顯示當前的瓶內氣壓、總流量、平均流速、pH值等參數。這部分程序在中斷函數中,已在主體部分流程圖中省略。
系統工作之前先由醫護人員選擇臟器手術類型,系統會據所需的負壓引流的門限壓強每30 s檢測一次檢測容器的氣壓,并動態控制薄膜泵引流體液,以保證瓶內穩定的負壓。當瓶內的氣壓大于門限氣壓時,系統依次打開薄膜泵1和電磁閥1,以防止瞬間的倒灌現象。
當液體被抽到緩沖容器中后,STM32使用12位AD采樣稱重傳感器模塊輸出的信號并計算得出每次注入的體液的質量,并計算體液所占的體積。最后,控制后級的薄膜泵2和電磁閥2將稱量后的體液注入吸收容器之中。并累加計算吸收容器吸收的液體體積,能及時提醒醫護人員及時更換后級的吸收劑。
4 系統測試
4.1 氣壓傳感器壓力測試
引流的壓力測試結果如表1所示。
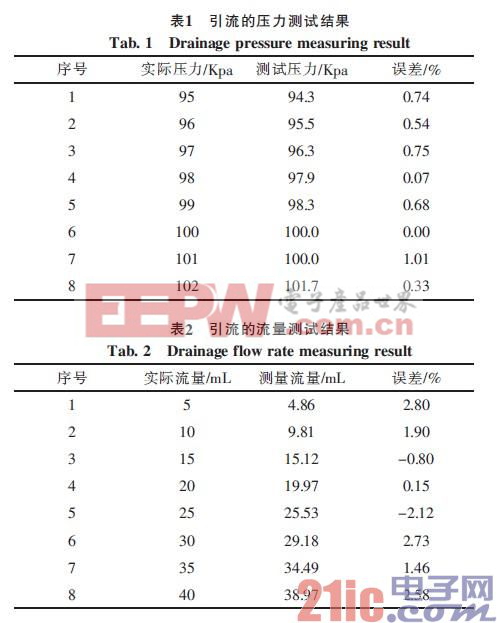
4.2 液位流量測試
引流的流量測試結果如表2所示。
綜上可見:壓力測試模塊的平均誤差為0.52%,滿足設備的要求。
流量檢測模塊的平均誤差為1.9%,滿足設備的要求。
5 結論
為了能夠使手術后病人能夠更加安全、方便地排出體液,文中設計實現了“基于嵌入式的術后引流負壓吸引器”.該系統能夠智能設定負壓大小并同時在抽取體液的過程中對病人的人體狀態進行必要的檢測。對抽取的體液在流量、重量、pH值等方面進行精確控制和測量,使得體液抽取工作具有可靠性高,實現方便、使用方便等優點。具有較為廣闊的應用前景。
linux操作系統文章專題:linux操作系統詳解(linux不再難懂) 稱重傳感器相關文章:稱重傳感器原理






評論