基于嵌入式系統(tǒng)自動(dòng)連續(xù)變倍視頻顯微鏡

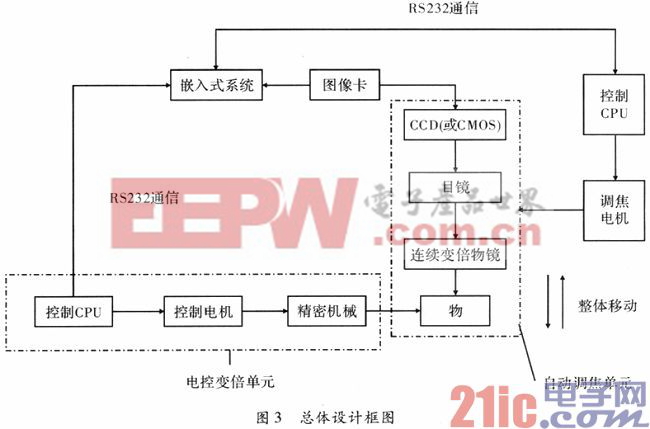
(2)總體設(shè)計(jì)方案。智能型連續(xù)變倍視頻顯微鏡實(shí)質(zhì)是在連續(xù)變倍系統(tǒng)中應(yīng)用嵌入式技術(shù),取代傳統(tǒng)計(jì)算機(jī)來自動(dòng)控制顯微鏡動(dòng)作的自動(dòng)系統(tǒng),在降低了成本的同時(shí)能快速實(shí)現(xiàn)自動(dòng)變倍、調(diào)焦和檢測功能,其簡潔而實(shí)用的技術(shù)讓取代人工變倍以及電腦變倍的視頻顯微鏡成為可能。從需求看,要具有自動(dòng)調(diào)焦和電控變倍兩大功能。1)從文獻(xiàn)可知,設(shè)計(jì)的自動(dòng)調(diào)焦方案思路是光學(xué)系統(tǒng)采集到的顯微圖像經(jīng)“CCD+PC”檢測,步進(jìn)電機(jī)驅(qū)動(dòng)實(shí)施。2)電控變倍方案適用于替代手動(dòng)在變倍手輪上實(shí)現(xiàn)不同角度的轉(zhuǎn)動(dòng),而達(dá)到光學(xué)系統(tǒng)連續(xù)變倍的目的。3)綜合上述思路,形成了文中總體設(shè)計(jì)方案,如圖3所示。本文引用地址:http://www.104case.com/article/148040.htm
2 自動(dòng)視頻顯微鏡機(jī)械結(jié)構(gòu)設(shè)計(jì)
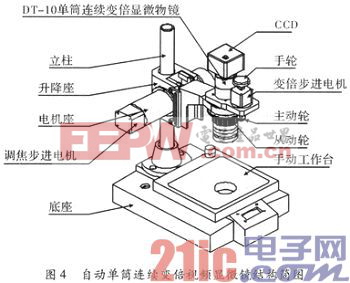
出于成本考慮,系統(tǒng)結(jié)構(gòu)框架采用桂電光機(jī)電一體化研究所與梧州市澳特光電儀器公司合作研發(fā)的DT—10單筒連續(xù)變倍視頻顯微鏡的主體部分,在調(diào)焦和變倍上改造而成。
物鏡的移動(dòng)一般使用步進(jìn)電機(jī)驅(qū)動(dòng),傳動(dòng)機(jī)構(gòu)有齒輪傳動(dòng)、精密絲杠傳動(dòng)和壓電陶瓷等。齒輪傳動(dòng)結(jié)構(gòu)較為簡單,傳動(dòng)比可調(diào),傳動(dòng)速度快;缺點(diǎn)是:受嚙合精度影響,由磨損間隙可造成一定空回失步,傳動(dòng)精度較低。精密絲杠容易實(shí)現(xiàn)高精度位移,缺點(diǎn)是移動(dòng)速度較慢、影響調(diào)節(jié)速度。壓電陶瓷利用壓電效應(yīng)原理,位移精度較高,可用電路控制位移大小;缺點(diǎn)是移動(dòng)范圍較小,只能用作小位移高精度微調(diào)。基于連續(xù)變倍視頻顯微鏡的景深較大,調(diào)焦、變倍的精度要求較低,因此采用齒輪傳動(dòng)機(jī)構(gòu)。
連續(xù)變倍視頻顯微鏡的電控變倍采用齒輪傳動(dòng),兩齒輪分別安裝在連續(xù)變倍視頻顯微鏡的變倍手輪和步進(jìn)電機(jī)軸上,結(jié)構(gòu)簡單,使變倍手輪轉(zhuǎn)動(dòng)角度可控,實(shí)現(xiàn)電控變倍。傳動(dòng)比為1:4,傳動(dòng)齒輪模數(shù)為0.5。通過齒輪齒條傳動(dòng),將電機(jī)的轉(zhuǎn)動(dòng)轉(zhuǎn)化為物鏡的移動(dòng),實(shí)現(xiàn)快速調(diào)焦。圖4為自動(dòng)單筒連續(xù)變倍視頻顯微鏡結(jié)構(gòu)圖。
3 自動(dòng)視頻顯微鏡伺服控制系統(tǒng)
3.1 電控變倍
3.1.1 連續(xù)變倍光學(xué)系統(tǒng)
變倍系統(tǒng)指焦距在一定范圍內(nèi)連續(xù)改變而像面位置保持不變的光學(xué)系統(tǒng)。目前變倍鏡頭均是用改變透鏡組之間的間隔來改變整個(gè)物鏡的焦距,在移動(dòng)透鏡改變焦距時(shí),總是伴隨著像面的移動(dòng),固此要對(duì)像面的移動(dòng)給予補(bǔ)償,主要有光學(xué)補(bǔ)償和機(jī)械補(bǔ)償兩種方式。目前后者是主流的方法。變倍鏡頭要根據(jù)變倍組與補(bǔ)償組位移間的數(shù)值關(guān)系計(jì)算出補(bǔ)償曲線,從而設(shè)計(jì)出補(bǔ)償像面移動(dòng)的凸輪機(jī)構(gòu)。通過旋轉(zhuǎn)加工了凸輪曲線槽的鏡筒,實(shí)現(xiàn)了連續(xù)變倍且又保證像面位置不變的目標(biāo)。








評(píng)論